MLSS 2012 in Kyoto
Brain and Reinforcement Learning
Kenji Doya
doya@oist.jp
Neural Computation Unit Okinawa Institute of Science and Technology
The theory of reinforcement learning provides a computational framework for understanding the brain's mechanisms for behavioral learning and decision making. In this lecture, I will present our studies on the representation of action values in the basal ganglia, the realization of model-based action planning in the network linking the frontal cortex, the basal ganglia, and the cerebellum, and the regulation of the temporal horizon of reward prediction by the serotonergic system.
Scroll with j/k | | | Size

MLSS 2012 in Kyoto
Brain and Reinforcement Learning
Kenji Doya
doya@oist.jp
Neural Computation Unit Okinawa Institute of Science and Technology
1
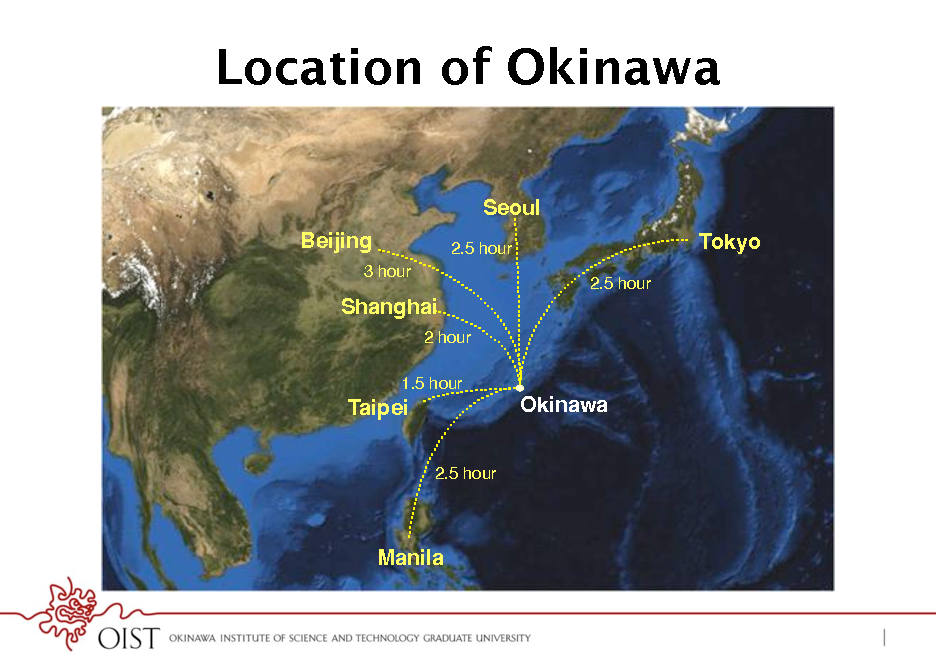
Location of Okinawa
Seoul! Beijing!
3 hour! 2.5 hour! 2.5 hour! 2 hour! 1.5 hour!
Tokyo!
Shanghai!
Taipei!
2.5 hour!
Okinawa!
Manila!
2
Okinawa Institute of Science & Technology
! Apr. 2004: Initial research ! President: Sydney Brenner ! Nov. 2011: Graduate university ! President: Jonathan Dorfan
! Sept. 2012: Ph.D. course ! 20 students/year
3
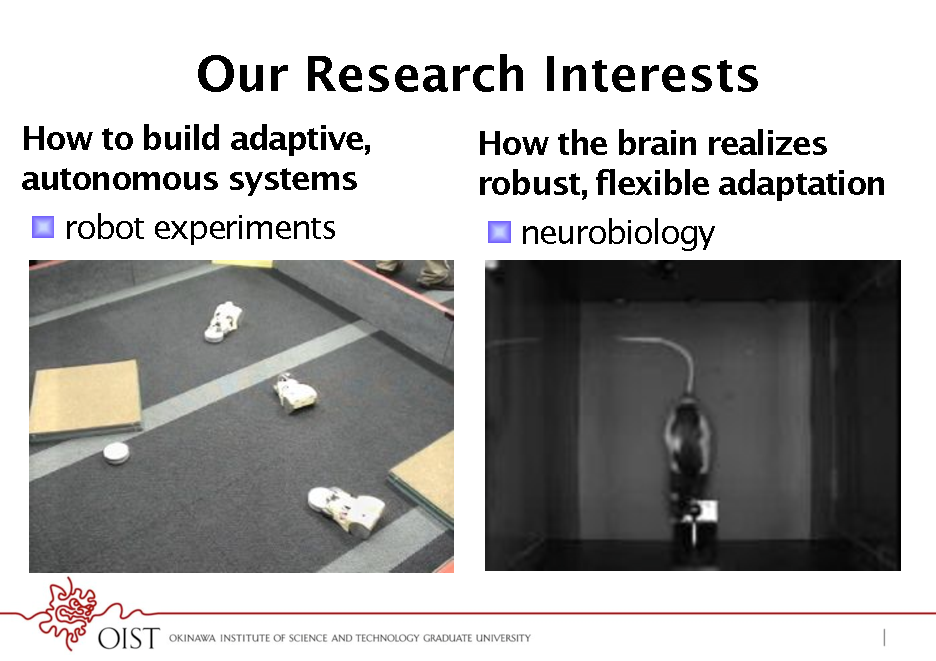
Our Research Interests
How to build adaptive, autonomous systems ! robot experiments How the brain realizes robust, flexible adaptation ! neurobiology
4
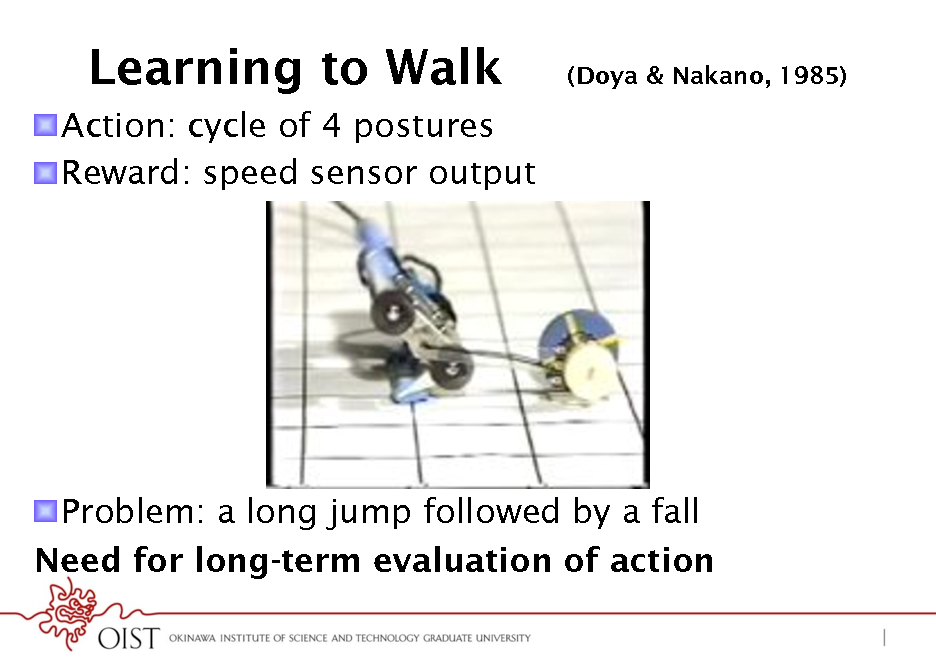
Learning to Walk
! Action: cycle of 4 postures ! Reward: speed sensor output
(Doya & Nakano, 1985)
! Problem: a long jump followed by a fall Need for long-term evaluation of action
5
![Slide: Reinforcement Learning
reward r ! action a ! state s ! agent! environment!
! Learn action policy: s a to maximize rewards ! Value function: expected future rewards ! V(s(t)) = E[ r(t) + r(t+1) + 2r(t+2) + 3r(t+3) +] V(s(t+1)! 01: discount factor ! Temporal difference (TD) error: ! (t) = r(t) + V(s(t+1)) - V(s(t))](https://yosinski.com/mlss12/media/slides/MLSS-2012-Doya-Neural-Implementation-of-Reinforcement-Learning_006.png)
Reinforcement Learning
reward r ! action a ! state s ! agent! environment!
! Learn action policy: s a to maximize rewards ! Value function: expected future rewards ! V(s(t)) = E[ r(t) + r(t+1) + 2r(t+2) + 3r(t+3) +] V(s(t+1)! 01: discount factor ! Temporal difference (TD) error: ! (t) = r(t) + V(s(t+1)) - V(s(t))
6
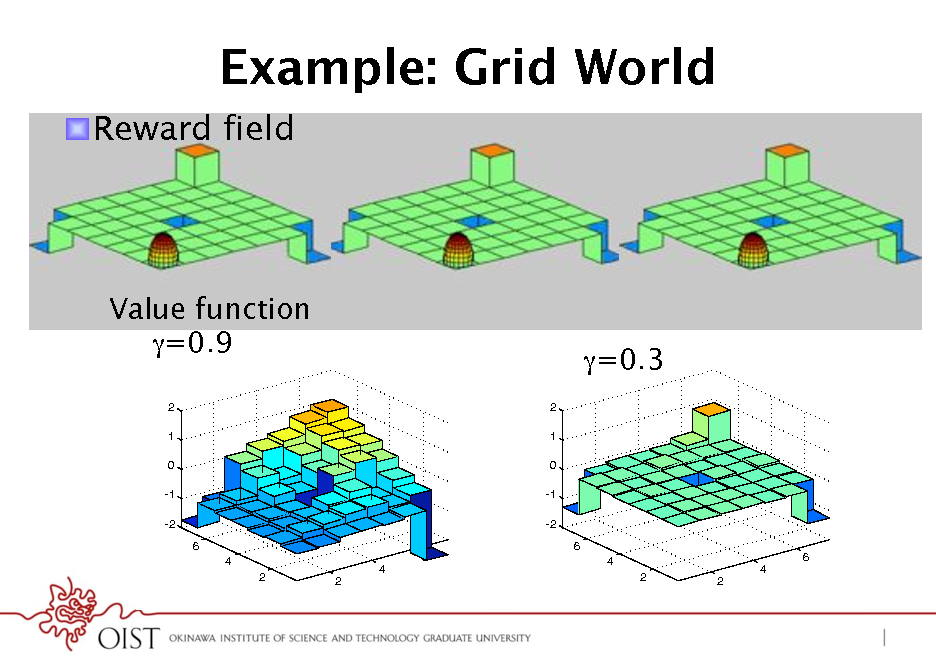
Example: Grid World
! Reward field
Value function
=0.9
2 1 0 -1 -2 6 4 2 2 6 4 2 1 0 -1 -2 6
=0.3
4 2 2
6 4
7
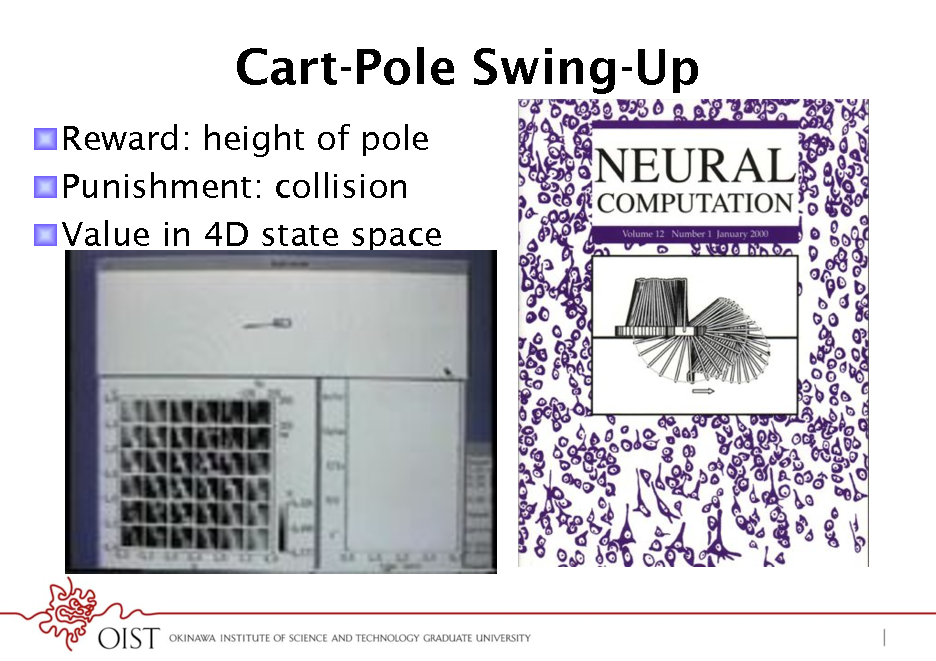
Cart-Pole Swing-Up
! Reward: height of pole ! Punishment: collision ! Value in 4D state space
8
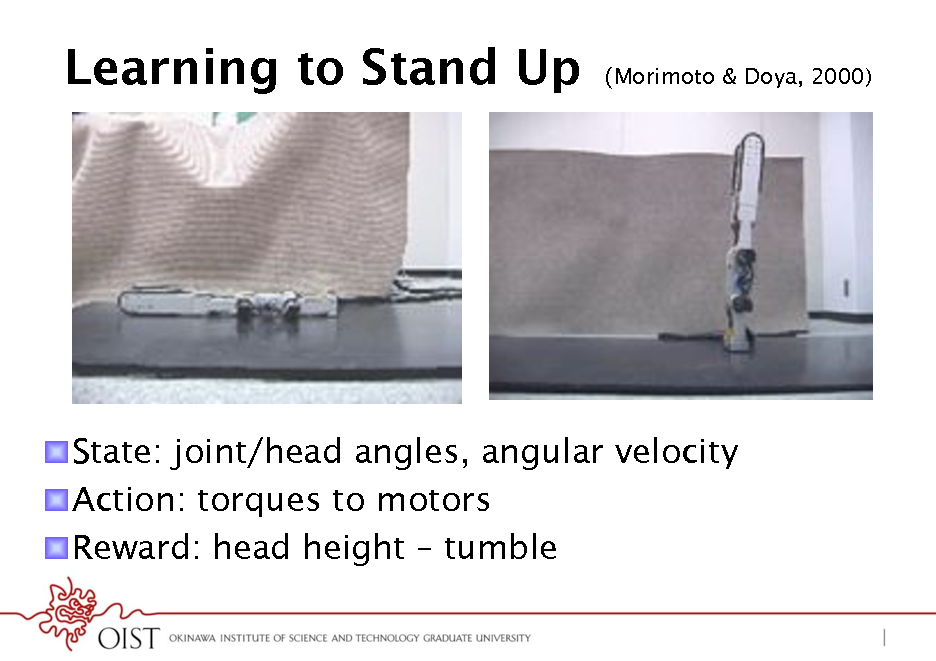
Learning to Stand Up
Morimoto & Doya, 2000)
! State: joint/head angles, angular velocity ! Action: torques to motors ! Reward: head height tumble
9
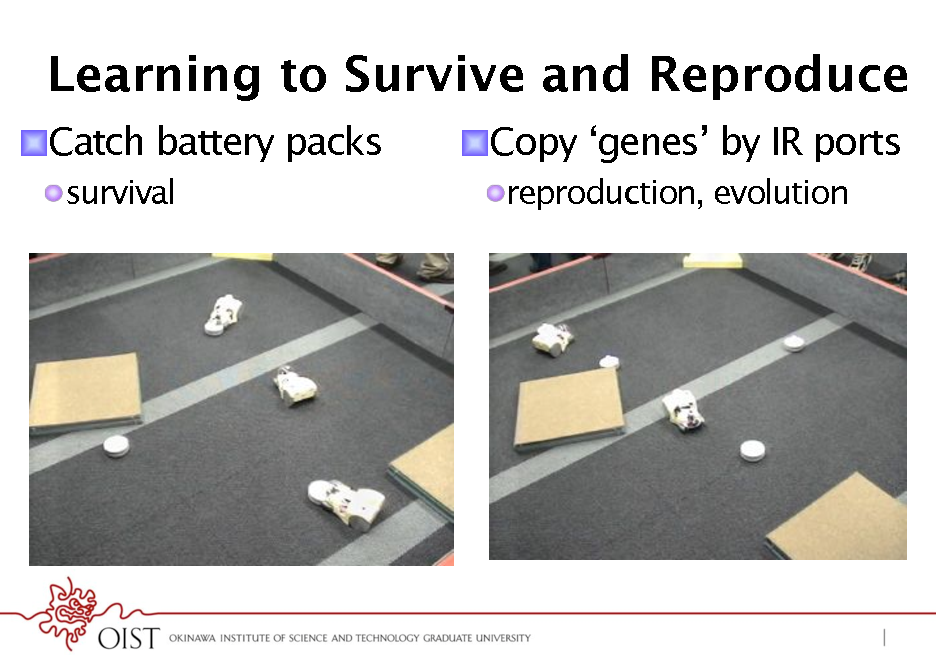
Learning to Survive and Reproduce
! Catch battery packs
! survival
! Copy genes by IR ports
! reproduction, evolution
10
![Slide: Markov Decision Process (MDP)
reward r ! ! Markov decision process ! state s S action a ! ! action a A agent! environment! ! policy p(a|s) state s ! ! reward r(s,a) ! dynamics p(s|s,a) ! Optimal policy: maximize cumulative reward ! finite horizon: E[ r(1) + r(2) + r(3) + ... + r(T)] ! infinite horizon: E[ r(1) + r(2) + 2r(3) + ] 01: temporal discount factor ! average reward: E[ r(1) + r(2) + ... + r(T)]/T, T](https://yosinski.com/mlss12/media/slides/MLSS-2012-Doya-Neural-Implementation-of-Reinforcement-Learning_011.png)
Markov Decision Process (MDP)
reward r ! ! Markov decision process ! state s S action a ! ! action a A agent! environment! ! policy p(a|s) state s ! ! reward r(s,a) ! dynamics p(s|s,a) ! Optimal policy: maximize cumulative reward ! finite horizon: E[ r(1) + r(2) + r(3) + ... + r(T)] ! infinite horizon: E[ r(1) + r(2) + 2r(3) + ] 01: temporal discount factor ! average reward: E[ r(1) + r(2) + ... + r(T)]/T, T
11
![Slide: Solving MDPs
Dynamic Programming
! ! p(s|s,a) and r(s,a) are known Solve Bellman equation V(s) = maxa E[ r(s,a) + V(s)] ! V(s): value function expected reward from state s Apply optimal policy a = argmaxa E[ r(s,a) + V*(s)] Value iteration Policy iteration
Reinforcement Learning
! ! ! ! ! ! ! ! p(s|s,a) and r(s,a) are unknown Learn from actual experience {s,a,r,s,a,r,} Monte Carlo SARSA Q-learning Actor-Critic Policy gradient Model-based ! learn p(s|s,a), r(s,a) and do DP
! ! !](https://yosinski.com/mlss12/media/slides/MLSS-2012-Doya-Neural-Implementation-of-Reinforcement-Learning_012.png)
Solving MDPs
Dynamic Programming
! ! p(s|s,a) and r(s,a) are known Solve Bellman equation V(s) = maxa E[ r(s,a) + V(s)] ! V(s): value function expected reward from state s Apply optimal policy a = argmaxa E[ r(s,a) + V*(s)] Value iteration Policy iteration
Reinforcement Learning
! ! ! ! ! ! ! ! p(s|s,a) and r(s,a) are unknown Learn from actual experience {s,a,r,s,a,r,} Monte Carlo SARSA Q-learning Actor-Critic Policy gradient Model-based ! learn p(s|s,a), r(s,a) and do DP
! ! !
12
![Slide: Actor-Critic and TD learning
! Actor: parameterized policy: P(a|s; w) ! Critic: learn value function V(s(t)) = E[ r(t) + r(t+1) + 2r(t+2) +] ! in a table or a neural network ! Temporal Difference (TD) error: ! (t) = r(t) + V(s(t+1)) - V(s(t)) ! Update ! Critic: V(s(t)) = (t) ! Actor: w = (t) P(a(t)|s(t);w)/w reinforce a(t) by (t)](https://yosinski.com/mlss12/media/slides/MLSS-2012-Doya-Neural-Implementation-of-Reinforcement-Learning_013.png)
Actor-Critic and TD learning
! Actor: parameterized policy: P(a|s; w) ! Critic: learn value function V(s(t)) = E[ r(t) + r(t+1) + 2r(t+2) +] ! in a table or a neural network ! Temporal Difference (TD) error: ! (t) = r(t) + V(s(t+1)) - V(s(t)) ! Update ! Critic: V(s(t)) = (t) ! Actor: w = (t) P(a(t)|s(t);w)/w reinforce a(t) by (t)
13
![Slide: SARSA and Q Learning
! Action value function ! Q(s,a) = E[ r(t) + r(t+1) + 2r(t+2) | s(t)=s,a(t)=a] ! Action selection ! -greedy: a = argmaxa Q(s,a) with prob 1-* ! Boltzman: P(ai|s) = exp[Q(s,ai)] / jexp[Q(s,aj)] ! SARSA: on-policy update ! Q(s(t),a(t)) = {r(t)+Q(s(t+1),a(t+1))-Q(s(t),a(t))} ! Q learning: off-policy update ! Q(s(t),a(t)) = {r(t)+maxaQ(s(t+1),a)-Q(s(t),a(t))}](https://yosinski.com/mlss12/media/slides/MLSS-2012-Doya-Neural-Implementation-of-Reinforcement-Learning_014.png)
SARSA and Q Learning
! Action value function ! Q(s,a) = E[ r(t) + r(t+1) + 2r(t+2) | s(t)=s,a(t)=a] ! Action selection ! -greedy: a = argmaxa Q(s,a) with prob 1-* ! Boltzman: P(ai|s) = exp[Q(s,ai)] / jexp[Q(s,aj)] ! SARSA: on-policy update ! Q(s(t),a(t)) = {r(t)+Q(s(t+1),a(t+1))-Q(s(t),a(t))} ! Q learning: off-policy update ! Q(s(t),a(t)) = {r(t)+maxaQ(s(t+1),a)-Q(s(t),a(t))}
14
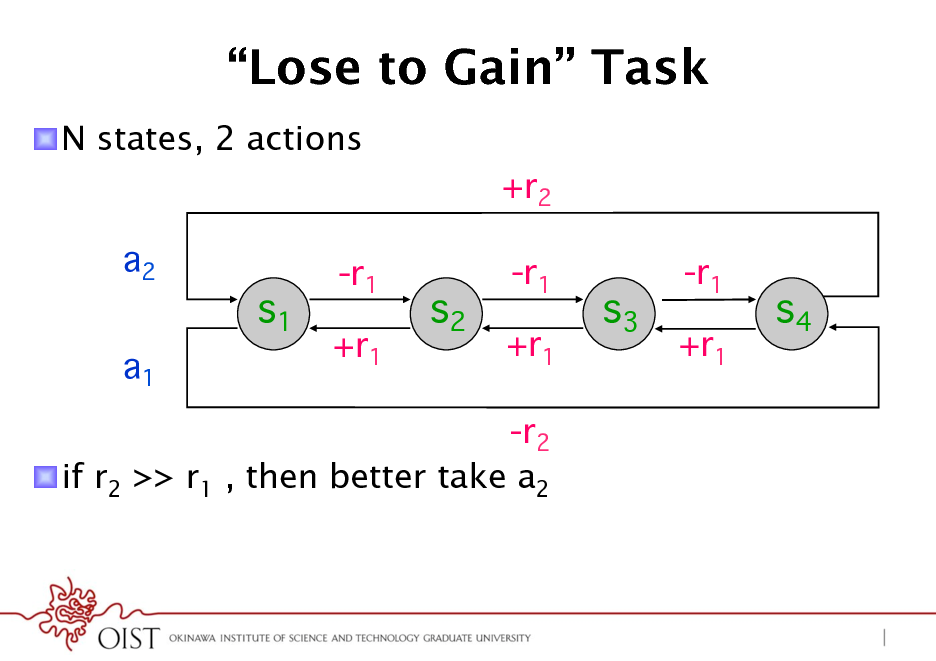
Lose to Gain Task
! N states, 2 actions +r2 a2 a1
s1
-r1 +r1
s2
-r1 +r1
s3
-r1 +r1
s4
-r2 ! if r2 >> r1 , then better take a2
15
![Slide: Reinforcement Learning
! Predict reward: value function ! V(s) = E[ r(t) + r(t+1) + 2r(t+2)| s(t)=s] ! Q(s,a) = E[ r(t) + r(t+1) + 2r(t+2)| s(t)=s, a(t)=a] ! Select action How to implement these steps? ! greedy: a = argmax Q(s,a) ! Boltzmann: P(a|s) exp[ Q(s,a)] ! Update prediction: TD error* ! (t) = r(t) + V(s(t+1)) - V(s(t)) How to tune these parameters? ! V(s(t)) = (t) ! Q(s(t),a(t)) = (t)](https://yosinski.com/mlss12/media/slides/MLSS-2012-Doya-Neural-Implementation-of-Reinforcement-Learning_016.png)
Reinforcement Learning
! Predict reward: value function ! V(s) = E[ r(t) + r(t+1) + 2r(t+2)| s(t)=s] ! Q(s,a) = E[ r(t) + r(t+1) + 2r(t+2)| s(t)=s, a(t)=a] ! Select action How to implement these steps? ! greedy: a = argmax Q(s,a) ! Boltzmann: P(a|s) exp[ Q(s,a)] ! Update prediction: TD error* ! (t) = r(t) + V(s(t+1)) - V(s(t)) How to tune these parameters? ! V(s(t)) = (t) ! Q(s(t),a(t)) = (t)
16
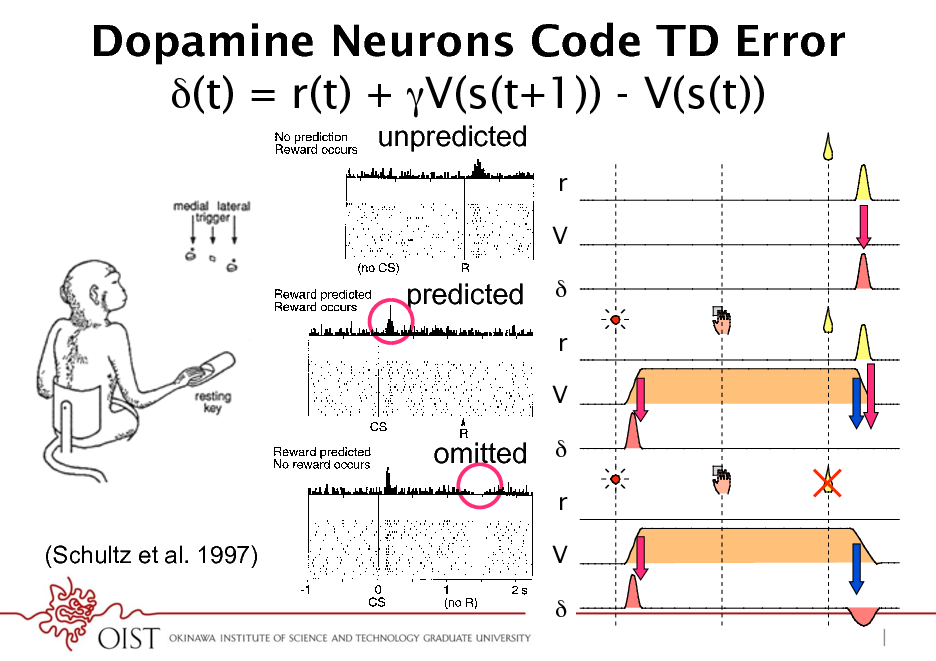
Dopamine Neurons Code TD Error (t) = r(t) + V(s(t+1)) - V(s(t))
4 W. SCHULTZ
unpredicted
rr
V V
predicted
*
rr
V V
fails to occur, even in the absence of an immediately preceding stimulus (Fig. 2, bottom). This is observed when animals fail to obtain reward because of erroneous behavior, when liquid ow is stopped by the experimenter despite correct behavior, or when a valve opens audibly without delivering liquid (Hollerman and Schultz 1996; Ljungberg et al. 1991; Schultz et al. 1993). When reward delivery is delayed for 0.5 or 1.0 s, a depression of neuronal activity occurs at the regular time of the reward, and an activation follows the reward at the new time (Hollerman and Schultz 1996). Both responses occur only during a few repetitions until the new time of reward delivery becomes predicted again. By contrast, delivering reward earlier than habitual results in an activation at the new time of reward but fails to induce a depression at the habitual time. This suggests that unusually early reward delivery cancels the reward prediction for the habitual time. Thus dopamine neurons monitor both the occurrence and the time of reward. In the absence of stimuli immediately preceding the omitted reward, the depressions do not constitute a simple neuronal response but reect an expectation process based on an internal clock tracking the precise time of predicted reward. Activation by conditioned, reward-predicting stimuli About 5570% of dopamine neurons are activated by conditioned visual and auditory stimuli in the various classically or instrumentally conditioned tasks described earlier (Fig. 2, middle and bottom) (Hollerman and Schultz 1996; Ljungberg et al. 1991, 1992; Mirenowicz and Schultz 1994; Schultz 1986; Schultz and Romo 1990; P. Waelti, J. Mirenowicz, and W. Schultz, unpublished data). The rst dopamine responses to conditioned light were reported by Miller et al. (1981) in rats treated with haloperidol, which increased the incidence and spontaneous activity of dopamine neurons but resulted in more sustained responses than in undrugged animals. Although responses occur close to behavioral reactions (Nishino et al. 1987), they are unrelated to arm and eye movements themselves, as they occur also ipsilateral to the moving arm and in trials without arm or eye movements (Schultz and Romo 1990). Conditioned stimuli are some-
omitted *
rr (Schultz et al. 1997)
FIG .
V V
2. Dopamine neurons report rewards according to an error in reward prediction. Top: drop of liquid occurs although no reward is predicted at this time. Occurrence of reward thus constitutes a positive error in the prediction of reward. Dopamine neuron is activated by the unpredicted
*
17
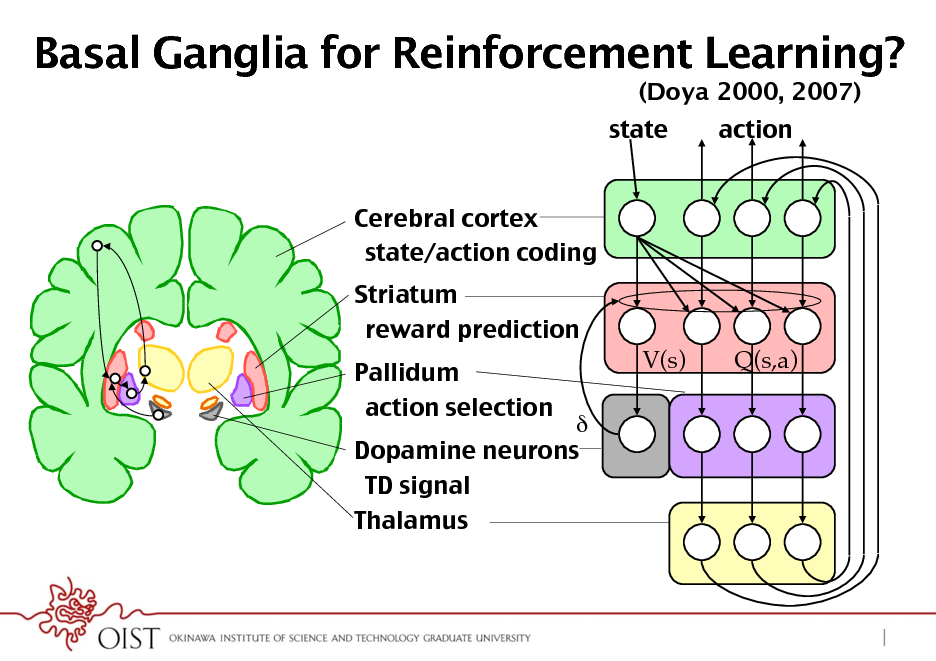
Basal Ganglia for Reinforcement Learning?
(Doya 2000, 2007) state Cerebral cortex! state/action coding! Striatum! reward prediction! Pallidum! action selection! V(s) Q(s,a) action
Dopamine neurons! TD signal! Thalamus!
18
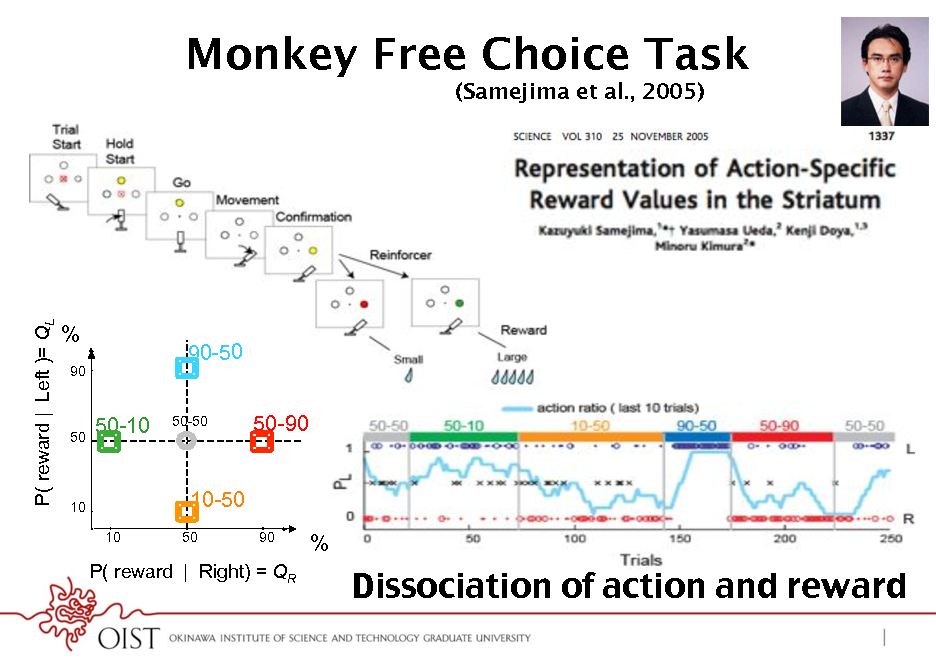
Monkey Free Choice Task
(Samejima et al., 2005)
P( reward | Left )= QL
%
90
90-50
50
50-10
50-50
50-90
10 10
10-50
50 90
%
P( reward | Right) = QR
Dissociation of action and reward!
19
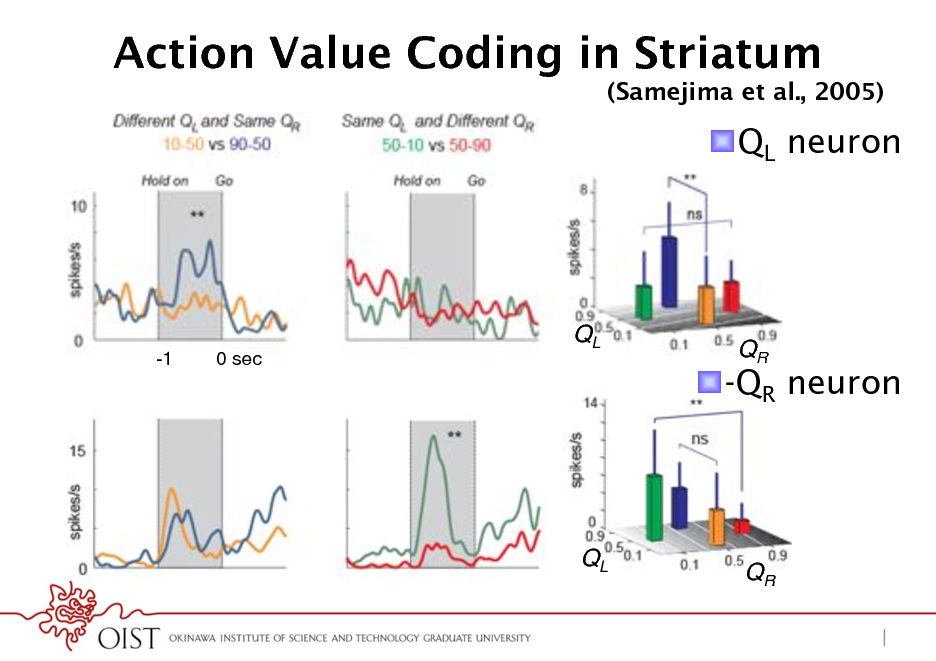
Action Value Coding in Striatum
(Samejima et al., 2005)
! QL neuron
-1
0 sec !
QL !
! -QR neuron
QR !
QL !
QR !
20
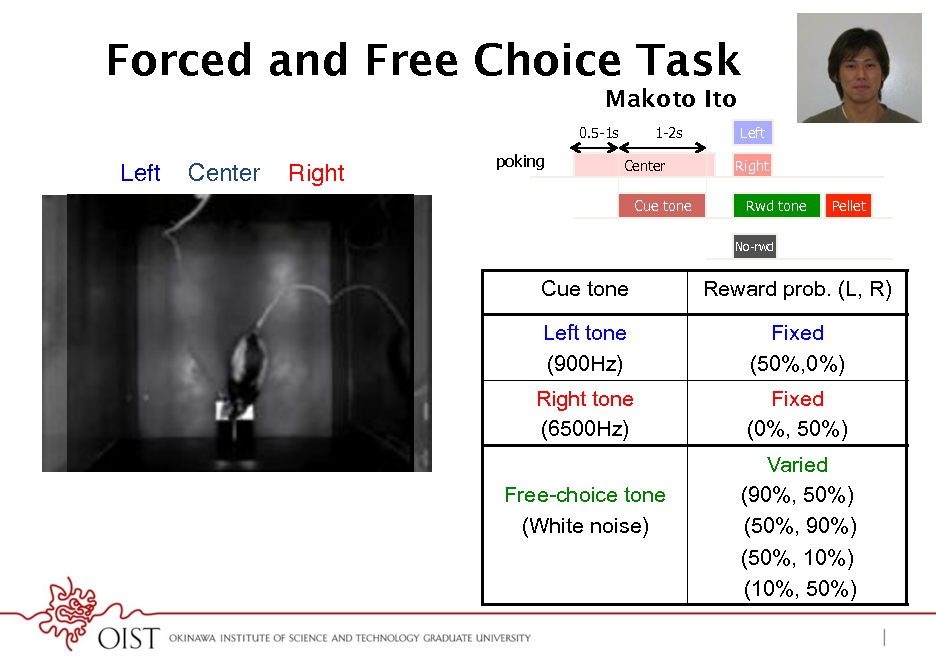
Forced and Free Choice Task
Makoto Ito
0.5-1s 1-2s Center Cue tone Left Right Rwd tone
No-rwd
Left !
Center !
Right !
poking
Pellet
Cue tone Left tone (900Hz)
Reward prob. (L, R) Fixed (50%,0%) Fixed (0%, 50%) Varied (90%, 50%) (50%, 90%) (50%, 10%) (10%, 50%)
pellet dish !
Right tone (6500Hz) Free-choice tone (White noise)
21
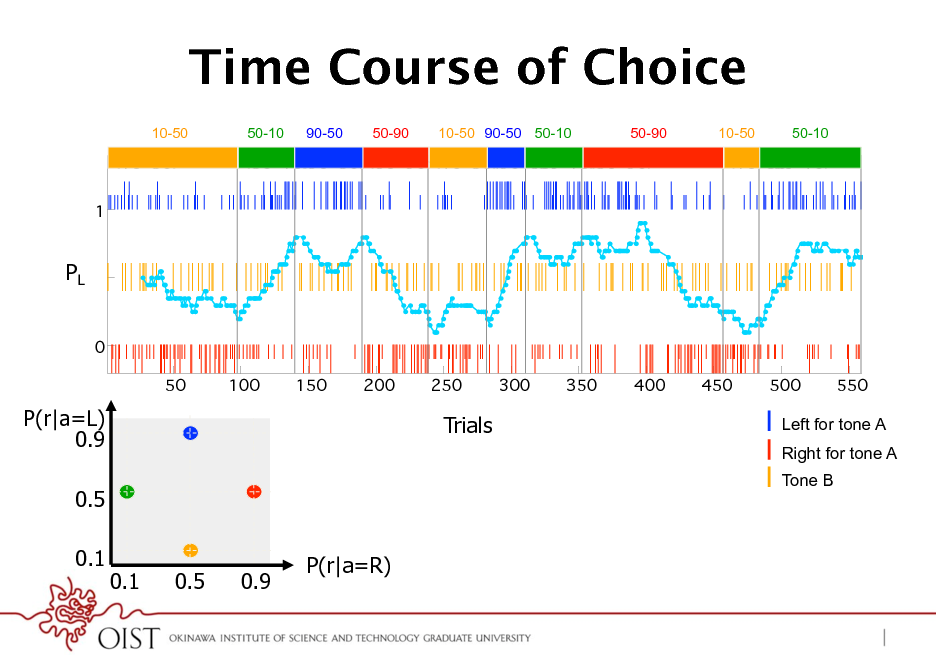
Time Course of Choice
10-50 50-10 90-50 50-90 10-50 90-50 50-10 50-90 10-50 50-10
PL
P(r|a=L) 0.9 0.5 0.1 P(r|a=R)
Trials
Left for tone A Right for tone A Tone B
0.1
0.5
0.9
22
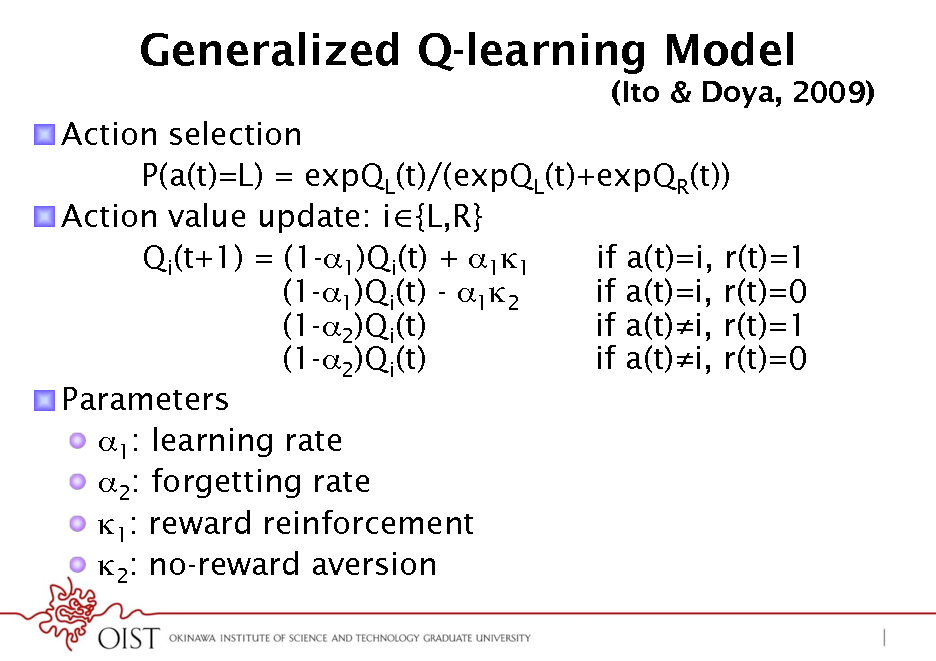
Generalized Q-learning Model
(Ito & Doya, 2009)
! Action selection P(a(t)=L) = expQL(t)/(expQL(t)+expQR(t)) ! Action value update: i {L,R} Qi(t+1) = (1-1)Qi(t) + 11 if a(t)=i, r(t)=1 (1-1)Qi(t) - 12 if a(t)=i, r(t)=0 (1-2)Qi(t) if a(t)i, r(t)=1 (1-2)Qi(t) if a(t)i, r(t)=0 ! Parameters ! 1: learning rate ! 2: forgetting rate ! 1: reward reinforcement ! 2: no-reward aversion
23
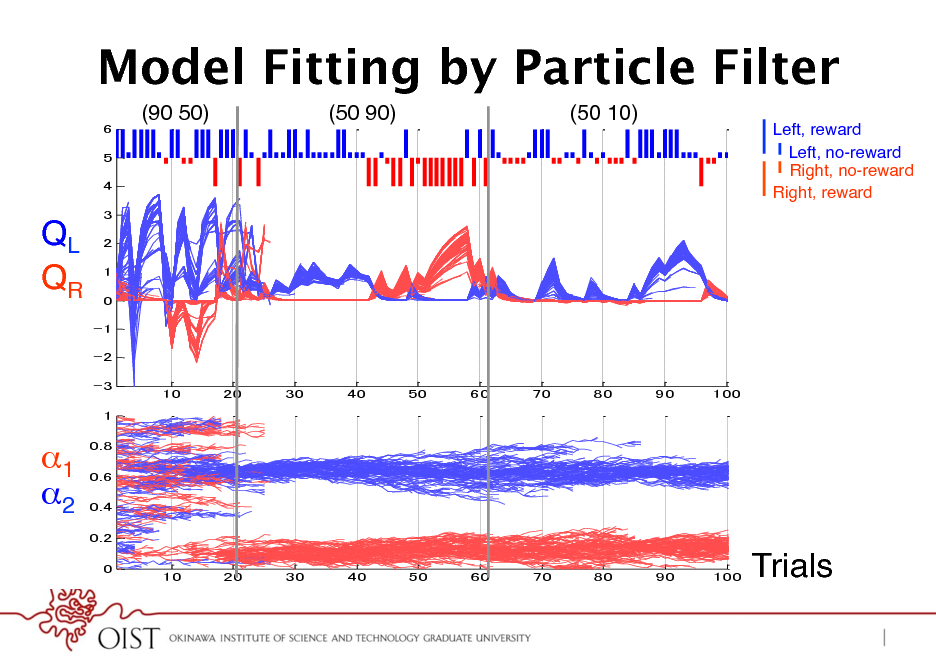
Model Fitting by Particle Filter
(90 50)! (50 90)! (50 10)!
Left, reward! Left, no-reward! Right, no-reward! Right, reward!
QL! QR!
1! 2! Trials!
24
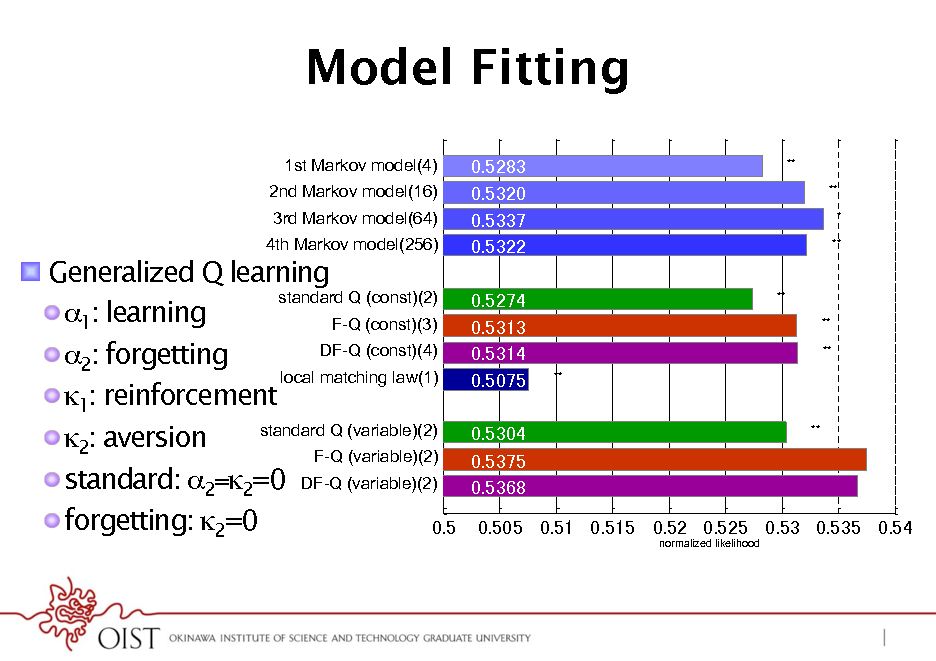
Model Fitting
1st Markov model(4)! 2nd Markov model(16)! 3rd Markov model(64)! 4th Markov model(256)!
**! **! *! **!
! Generalized Q learning standard Q (const)(2)! ! 1: learning F-Q (const)(3)! DF-Q (const)(4)! ! 2: forgetting local matching law(1)! ! 1: reinforcement standard Q (variable)(2)! ! 2: aversion F-Q (variable)(2)! ! standard: 2=2=0 DF-Q (variable)(2)! ! forgetting: 2=0
**! **! **! **!
**!
normalized likelihood!
25
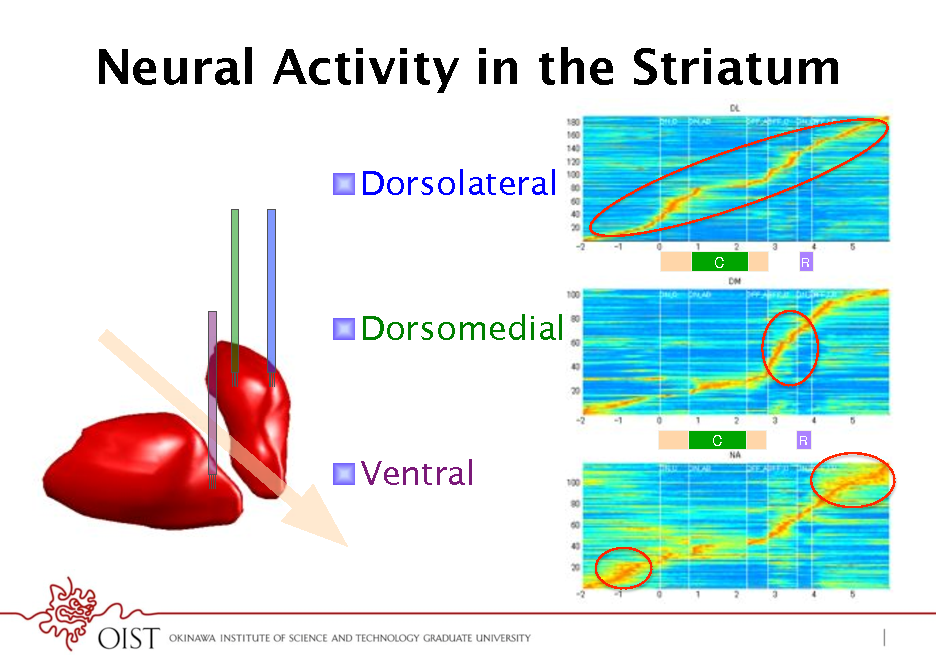
Neural Activity in the Striatum
! Dorsolateral
C!
R!
! Dorsomedial
C!
R!
! Ventral
26
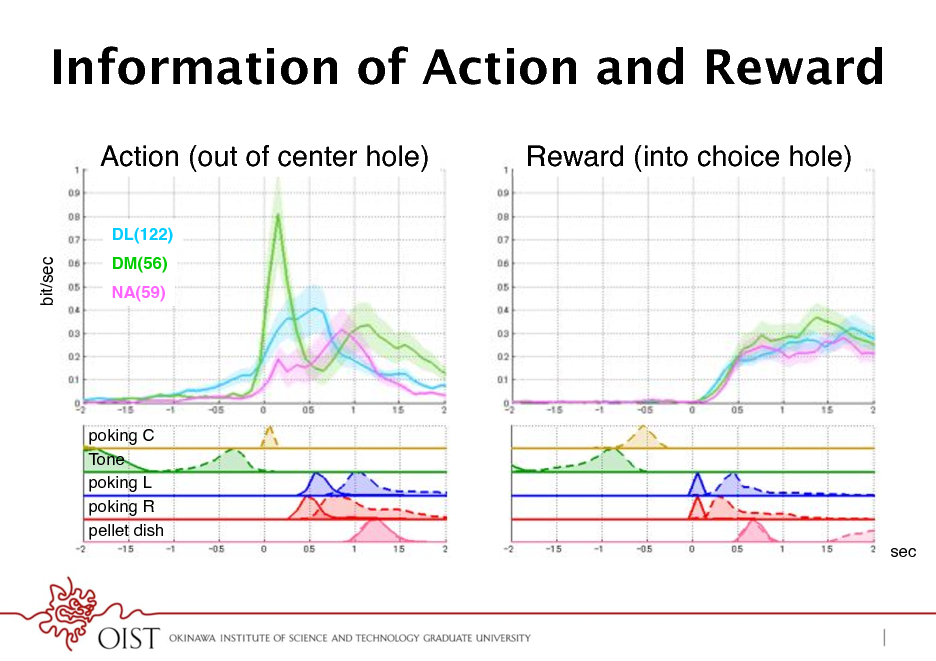
Information of Action and Reward
Action (out of center hole) !
DL(122)!
bit/sec!
Reward (into choice hole) !
DM(56)! NA(59)!
poking C! Tone! poking L! poking R! pellet dish! sec!
27
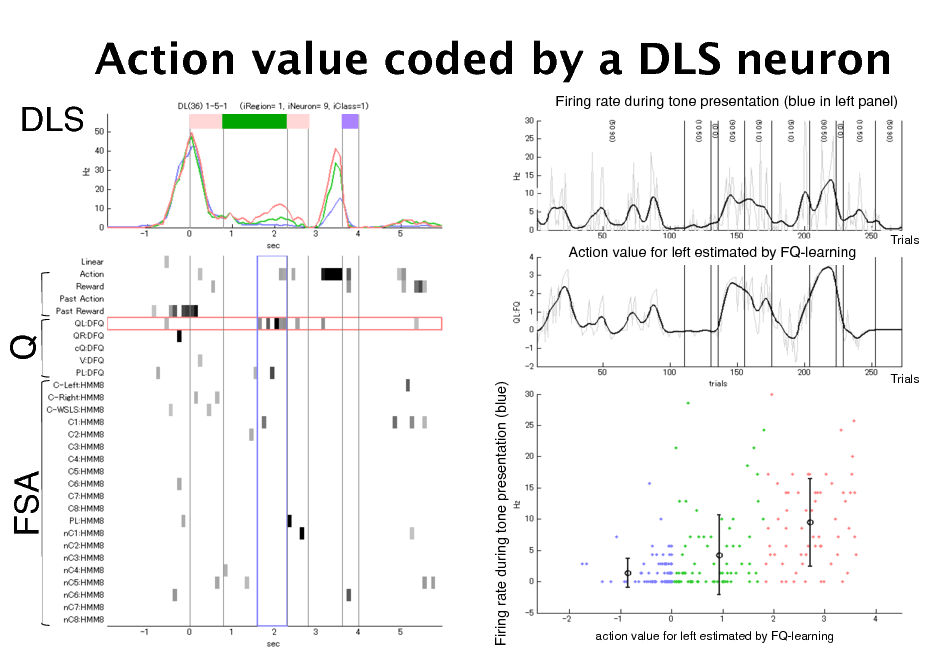
Action value coded by a DLS neuron
DLS!
Firing rate during tone presentation (blue in left panel)!
Action value for left estimated by FQ-learning!
Trials!
Q!
Firing rate during tone presentation (blue)!
Trials!
FSA!
action value for left estimated by FQ-learning!
28
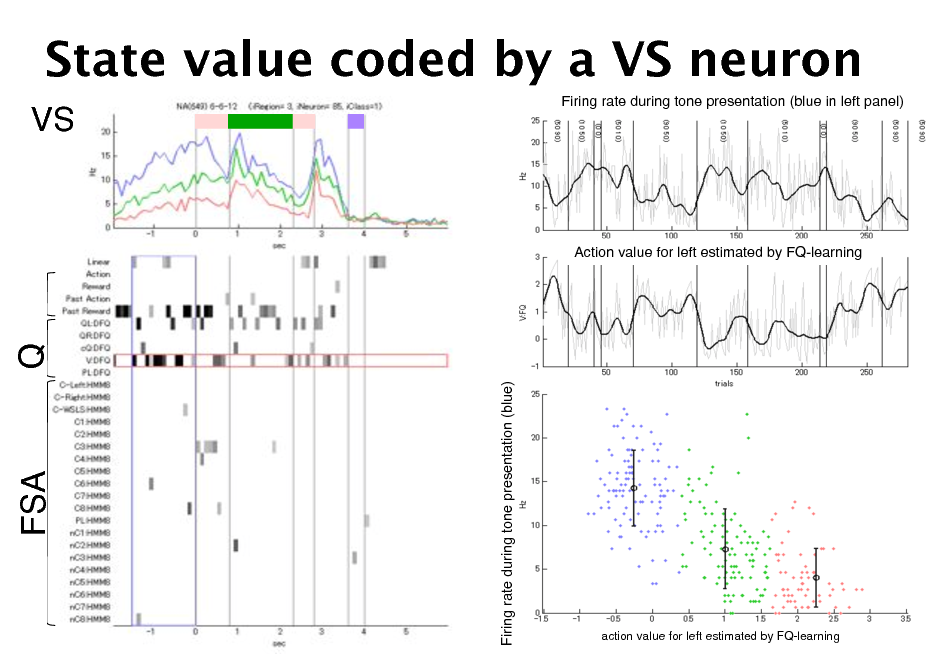
State value coded by a VS neuron
VS!
Firing rate during tone presentation (blue in left panel)!
Action value for left estimated by FQ-learning!
Q!
Firing rate during tone presentation (blue)!
FSA!
action value for left estimated by FQ-learning!
29
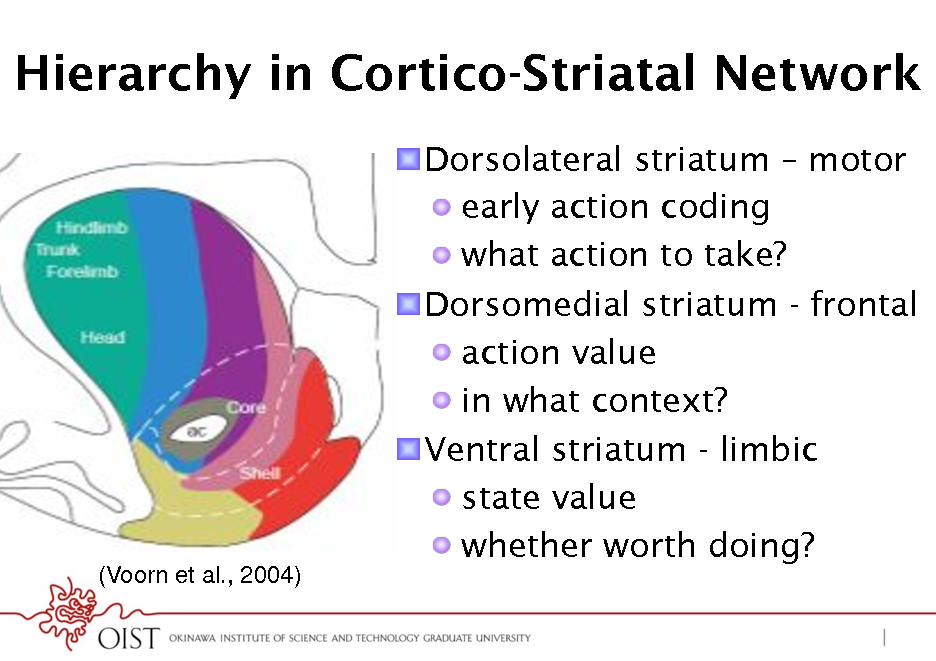
Hierarchy in Cortico-Striatal Network
! Dorsolateral striatum motor ! early action coding ! what action to take? ! Dorsomedial striatum - frontal ! action value ! in what context? ! Ventral striatum - limbic ! state value ! whether worth doing?
(Voorn et al., 2004)!
30
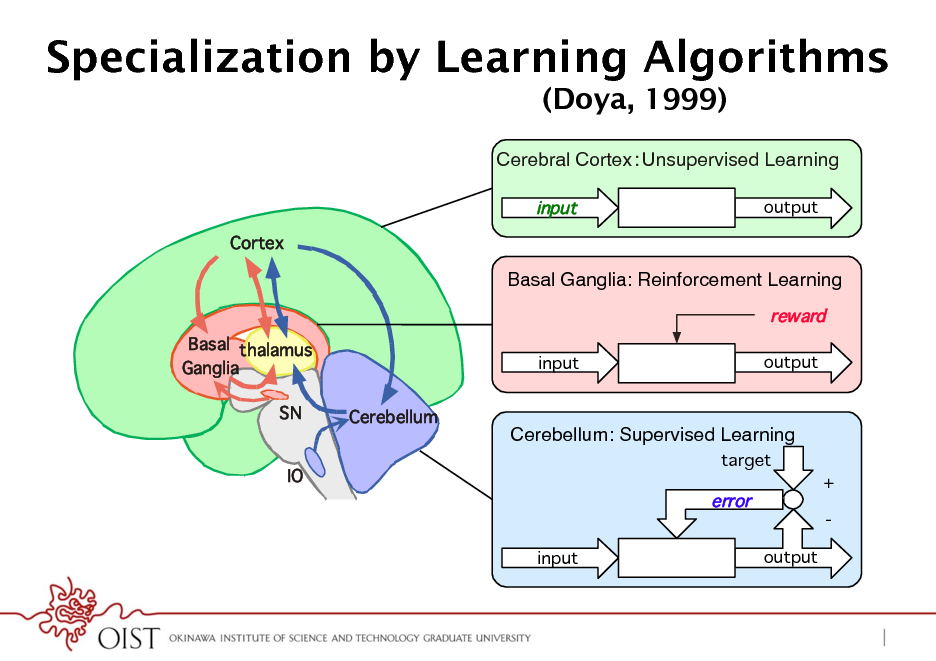
Specialization by Learning Algorithms
(Doya, 1999)
Cerebral CortexUnsupervised Learning!
input
Cortex output
Basal Ganglia: Reinforcement Learning!
reward
Basal thalamus Ganglia SN Cerebellum input output
Cerebellum: Supervised Learning!
target
IO
error
input output
+ -
31
![Slide: Multiple Action Selection Schemes
! Model-free ! a = argmaxa Q(s,a) ! Model-based ! a = argmaxa [r+V(f(s,a))] forward model: f(s,a) ! Lookup table a ! a = g(s)
a Q a ai s V f s s s
g](https://yosinski.com/mlss12/media/slides/MLSS-2012-Doya-Neural-Implementation-of-Reinforcement-Learning_032.png)
Multiple Action Selection Schemes
! Model-free ! a = argmaxa Q(s,a) ! Model-based ! a = argmaxa [r+V(f(s,a))] forward model: f(s,a) ! Lookup table a ! a = g(s)
a Q a ai s V f s s s
g
32
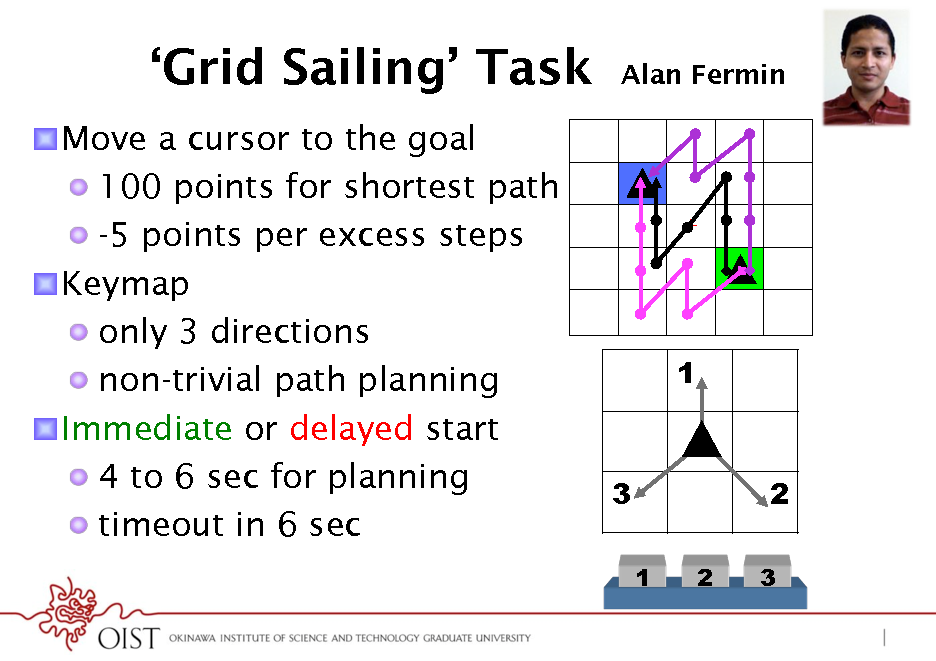
Grid Sailing Task
! Move a cursor to the goal ! 100 points for shortest path ! -5 points per excess steps ! Keymap ! only 3 directions ! non-trivial path planning ! Immediate or delayed start ! 4 to 6 sec for planning ! timeout in 6 sec
Alan Fermin
+
1
3
1 2
2
3
33
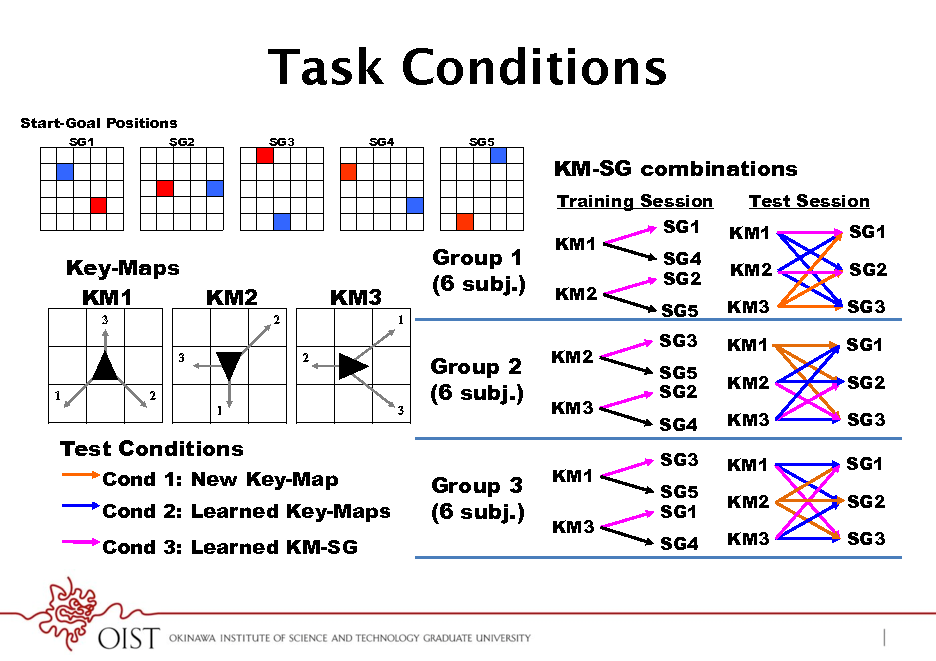
KM3 SG3 SG4 Q>=A89H;<R)B=?7)>C<):>8=>)Q=<GR)>?)>C<)>8=H<>)H?8;)QE;6<R)EF):<_6<9>A8;;F)K=<::A9H) Test Conditions SG3 SG1 KM1 >C=<<)I<F:M)Y9:>=6@>A?9)J8:)>?);<8=9)8):A9H;<)?K>A78;)8@>A?9):<_6<9@<)Q:C?=><:>) KM1 Cond 1: New Key-Map Group 3 SG5 SG2 KM2 SG1 Cond 2: Learned Key-Maps (6 subj.) K8>CJ8FR)B?=)<8@C)?B)>C<)124*!)K8A=:D)JCA@C)J<=<)@?9:>89>)>C=?6HC?6>)>C<) KM3 KM3 SG3 SG4 Cond 3: Learned KM-SG <LK<=A7<9>M)/C<):>8=>)K?:A>A?9)@?;?=):K<@ABA<G)JC<>C<=)>?):>8=>)8)=<:K?9:<) Start-Goal Positions A77<GA8><;F)?=)8B><=)8)G<;8F)Q`:<@RM
Task Conditions
SG3 SG4 SG5
SG1
SG2
Buttons & Fingers
1 2 3 INDEX MIDDLE RING
KM-SG combinations
Training Session
Test Schedule
TB1
Test Session SG1
2400 2200 2000 1800 1600 1400 1200 1000 800 600 400 200 0 A-2 A-1 A-1 A-3 A-3
Reaction Time (ms)
TB1
4 trials 4 trials 4 trials 4 trials
=<<:F=8G: F:78L:F =<<:F=8G: F:78L:F
Random Random Random Random 9 trials 9 trials 9 trials 9 trials
=<<:F=8G: F:78L:F =<<:F=8G: F:78L:F
KM3
2
TB2
KM2 KM2 KM3
SG5 SG3 SG5 SG2
15 10
KM3 KM1
5 0
Reaction Time (ms)
Key-Maps 240 trials TB2 TB3 KM1 Random Random KM2 Random Random
1 2 19 20
Training Schedule
Group 1 180 trials (6 subj.)
9 10
KM1
SG1 KM1 !"#$%&'()*$+,-./&'0)1234*!(
2400 2200 2000 1800 1600 1400 1200 1000 800 600 400 200 0 A-2 A-1 A-1 A-3 A-3
SG4 SG2
KM2
SG2 SG3 SG1
15 10 5
1
Sequence of Trial Events
IMMEDIATE ITI DELAY
Group 2 No Reach Reward (6 subj.)
T
Action Sequence
Trial
KM2 KM3 KM1 KM2 KM3
Action Sequence
SG2
Trial
S S
Goal Reach
S
U
Test Conditions
S S
3~5 sec 4~6 sec
SG4 SG3 SG5 SG1 SG4
Cond 1: New Key-Map
6 sec
Cond 2: Learned Key-Maps Cond 3: Learned KM-SG
S
Time-over: 0 Fail: -5 Optimal: 100
Group 3 >U S (6 subj.) VU
2 sec
KM1 KM3
e<)@?9BA=7<G)>C<) SG3 B?=78>A?9)?B)C8EA> A9)8;;)K<=B?=789@< 8@_6A:A>A?9)89G)8)G SG1 =<8@C)>C<)>8=H<>)H? BA9A:C)89)8@>A?9):<_ SG2 8;:?)?E:<=O<G)A9)>C SG3 89G)8B><=)?9<)9AHC
Start-Goal Positions
SG1 SG2 SG3 SG4 SG5
34
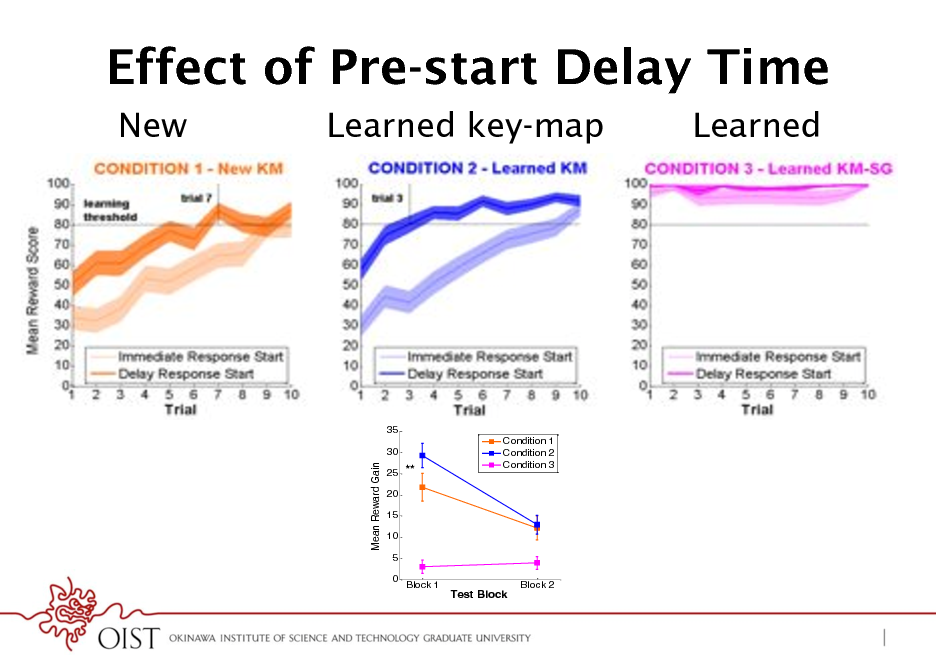
Effect of Pre-start Delay Time
New Learned key-map Learned
35 30 Condition 1 Condition 2 Condition 3
100 90 80
100 90
% Optimal Goal Reach
Mean Reward Gain
% Reward Score
25 ** 20 15 10 5 0 Block 1
80 70 60 50 40 30 20 10 0 1
70 60 50 40 30 20 10 0
**
**
Error Suboptimal Optimal
Test Block
Block 2
2
3
4
Trial Type
Trial
5
6
7
35
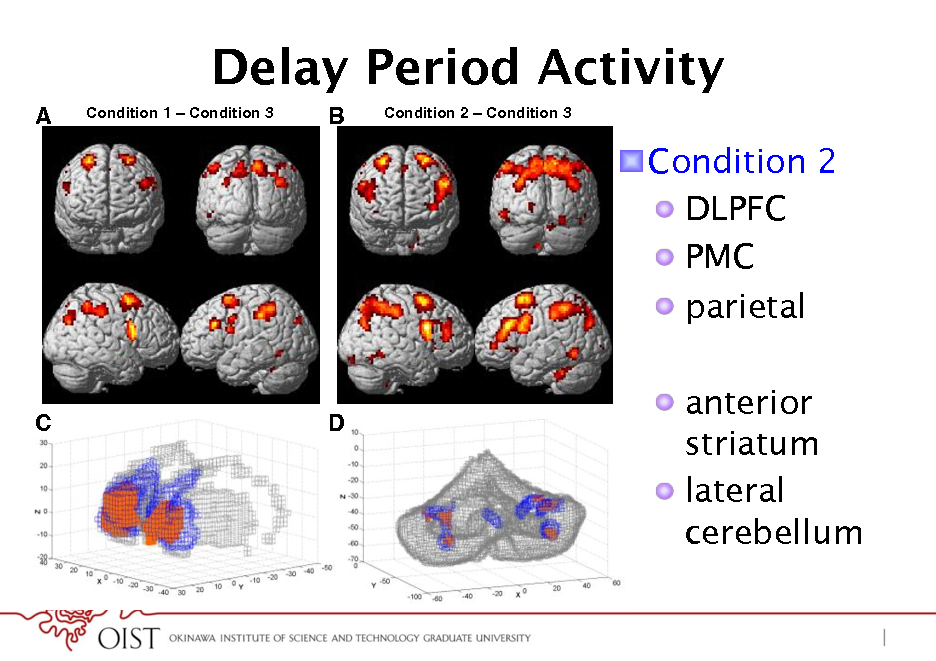
Delay Period Activity
A
Condition 1 Condition 3
B
Condition 2
Condition 3
! Condition 2 ! DLPFC ! PMC ! parietal ! anterior striatum ! lateral cerebellum
C
D
36
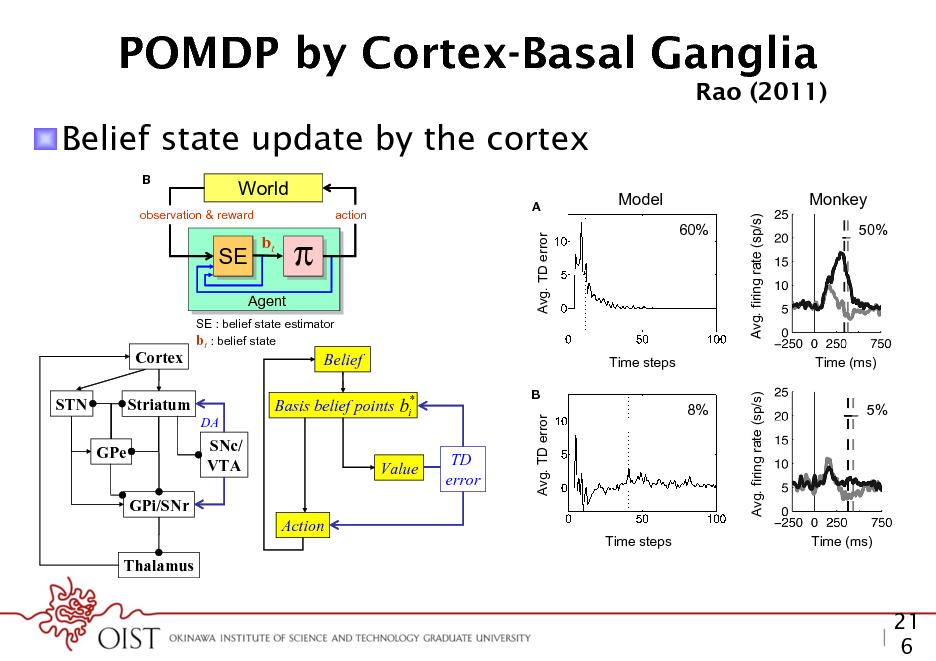
POMDP by Cortex-Basal Ganglia
Decision making under uncertainty
Rao (2011)
Rao
! Belief state update by the cortex
B
(s,a,s)
World
action
Rao
SE SE
bt
Avg. TD error
60%
Avg. firing rate (sp/s)
observation & reward
A
Model
Monkey
50%
Action a
Decision makin
nt
Agent
SE : belief state estimator bt : belief state
Cortex
Belief
t the space of beliefs ate vector is a prob1 nsional (number of describing the feedforward transformation of the input, M is the GPi/SNr es). This makes the matrix of recurrent synaptic weights, and g1 is a dendritic ltering Action ult. In fact, nding function. has been proved to The above differential equation can be rewritten in discrete nite-horizon case is Thalamus form as: 1987). However, one of which work | Suggested mapping of elements of the model to components FIGURE 3 well v t (i ) f (ot ) g M (i , j )v t 1( j ) (4) o a popular class of j of the cortex-basal ganglia network. STN, subthalamic nucleus; GPe, globus ed POMDP solvers pallidus, external segment; GPi, Globus pallidus, internal segment; SNc,
GPe
SNc/ TD VTA where v denotes the vector of output ring rates, o denotes the Value error input observation vector, f is a potentially non-linear function
Avg. TD error
b
Avg. firing rate (sp/s)
ecutes an action a in the e s according to the STN ervation o of the new der to solve the POMDP
problem, the animal maintains a belief bt which is a probability distribution over states of the world. This belief is computed iteratively using Bayesian inference * Striatum Basis for the points step is provided by by the belief state estimator SE. An actionbeliefcurrent time i DA the learned policy , which maps belief states to actions.
We model the task using a POMDP as follow Time steps Time (ms) underlying hidden states representing the two possi coherent motion (leftward or rightward). In each t B 8% menter chooses one of these hidden states5% (either le ward) and provides the animal with observations state in the form of an image sequence of random do coherence. Note that the hidden state remains the sa of the trial. Using only the sequence of observed im the animal must choose one of the following actio Time steps Time (ms) more time step (to reduce uncertainty), make a left FIGURE 16 | Reward predictionchoice dopamine responses in the ment (indicating error and of leftward motion), or m random dots task. (A) The plot on the left shows the temporal evolution of eye movement (indicating choice of rightward mo reward prediction (TD) error in the model, averaged over trials with Easy motion coherence (coherence = 60%). The dotted line shows the average We use the notation SL to represent the21 state reaction time. The plot on the right shows the average ring rate of dopamine neuronsleftward motion and random dots task at 50% motion 6 to in SNc in a monkey performing the S to represent rightward
37
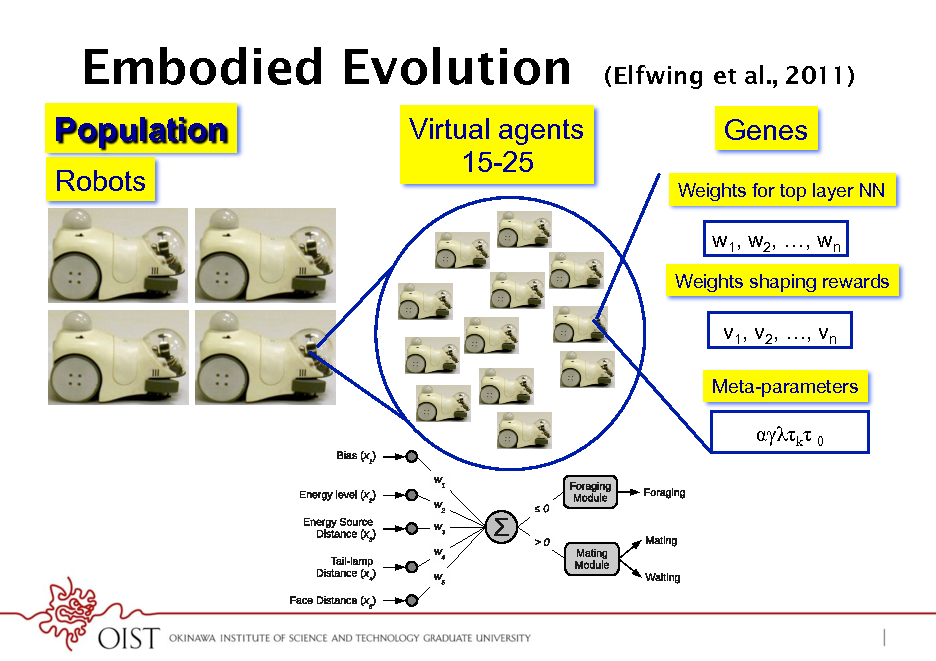
Embodied Evolution
Population
Robots Virtual agents 15-25
13
(Elfwing et al., 2011)
Genes
Weights for top layer NN
w1, w2, , wn
Weights shaping rewards
v1, v2, , vn
Meta-parameters
(a)
k 0
(b)
38
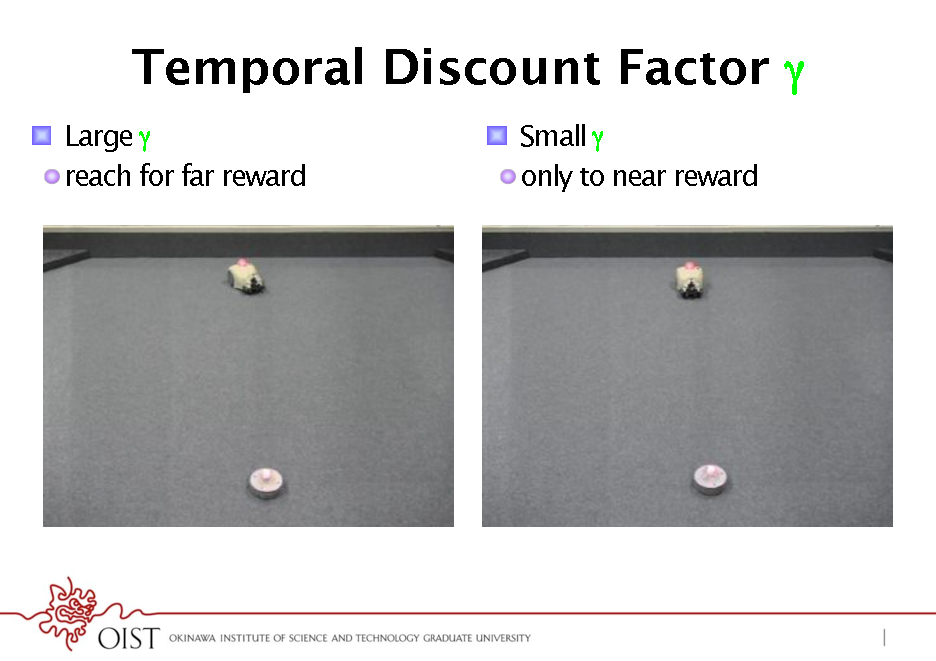
Temporal Discount Factor *
! Large ! reach for far reward* ! Small ! only to near reward*
39
![Slide: Temporal Discount Factor *
! V(t) = E[ r(t) + r(t+1) + 2r(t+2) + 3r(t+3) +] ! controls the character of an agent
large
1 no pain, no gain! V =18.7 0 -20 -20 -20 1 1 stay away from danger 0 V = -22.9 +50 1 2 -100 3 4 step 2 3 4 step 1 0 +50 1 2 -100 3 4 step +100 1 0 -20 -20 -20 1 2 3 4 step
small
+100
Depression?!
better stay idle V =-25.1
Impulsivity?!
cant resist temptation V = 47.3](https://yosinski.com/mlss12/media/slides/MLSS-2012-Doya-Neural-Implementation-of-Reinforcement-Learning_040.png)
Temporal Discount Factor *
! V(t) = E[ r(t) + r(t+1) + 2r(t+2) + 3r(t+3) +] ! controls the character of an agent
large
1 no pain, no gain! V =18.7 0 -20 -20 -20 1 1 stay away from danger 0 V = -22.9 +50 1 2 -100 3 4 step 2 3 4 step 1 0 +50 1 2 -100 3 4 step +100 1 0 -20 -20 -20 1 2 3 4 step
small
+100
Depression?!
better stay idle V =-25.1
Impulsivity?!
cant resist temptation V = 47.3
40
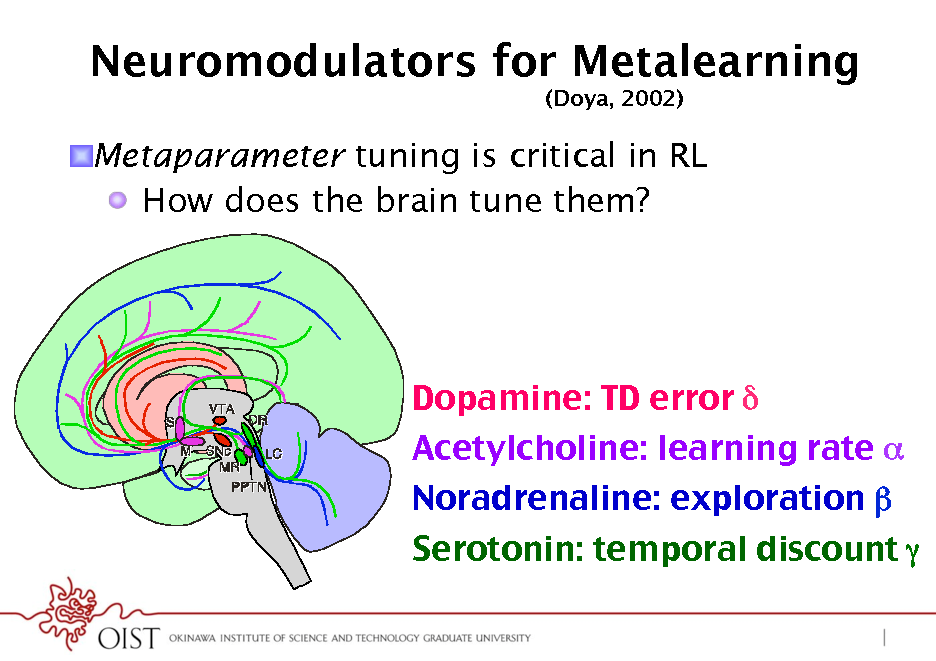
Neuromodulators for Metalearning
(Doya, 2002)
! Metaparameter tuning is critical in RL ! How does the brain tune them?
Dopamine: TD error ! Acetylcholine: learning rate ! Noradrenaline: exploration Serotonin: temporal discount !
41
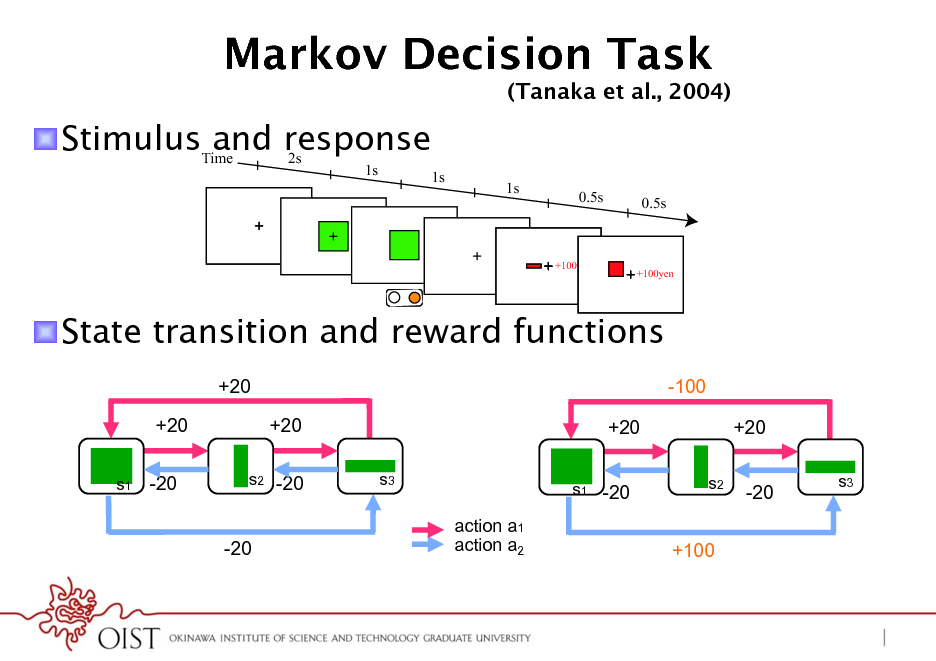
Markov Decision Task
! StimulusTime response and 2s
1s 1s 1s 0.5s 0.5s
(Tanaka et al., 2004)
+100yen
+100yen
! State transition and reward functions
+20 +20
s1 -20
-100 +20 +20
s3 s1 -20 s2
+20 -20
s3
s2 -20
-20
action a1 action a2
+100
42
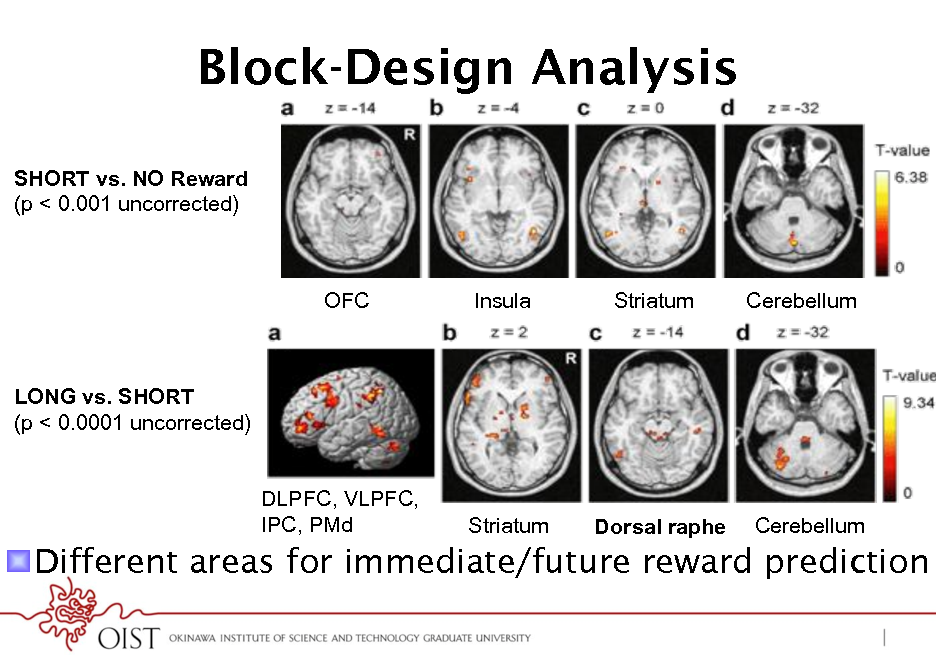
Block-Design Analysis
SHORT vs. NO Reward (p < 0.001 uncorrected)
OFC
Insula
Striatum
Cerebellum
LONG vs. SHORT (p < 0.0001 uncorrected) DLPFC, VLPFC, IPC, PMd
Striatum
Dorsal raphe
Cerebellum
! Different areas for immediate/future reward prediction
43
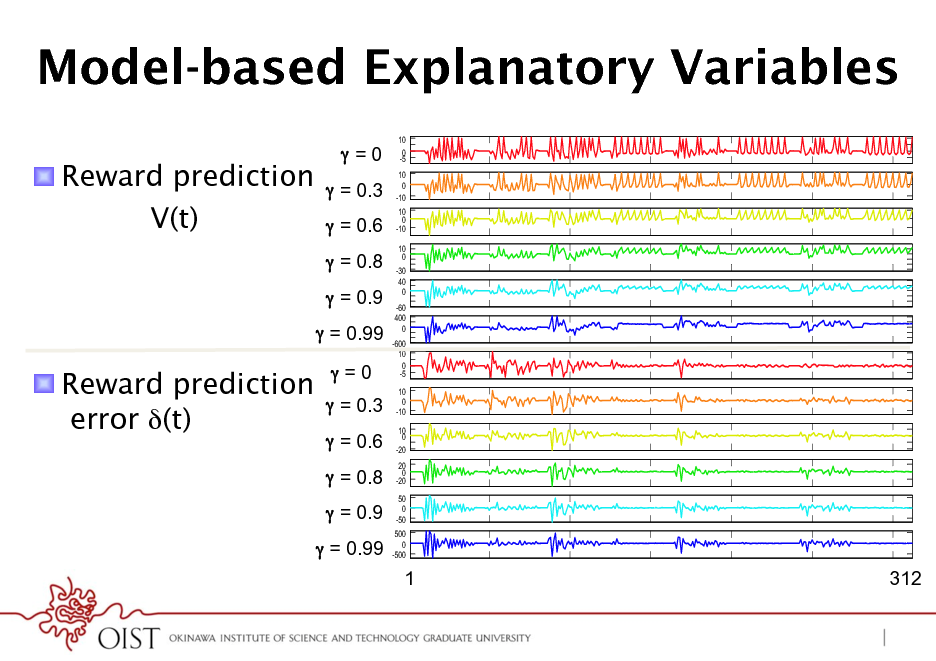
Model-based Explanatory Variables
! Reward prediction V(t)
=0 = 0.3 = 0.6 = 0.8 = 0.9 = 0.99
10 0 -5 10 0 -10 10 0 -10 10 0 -30 40 0 -60 400 0 -600 10 0 -5 10 0 -10 10 0 -20 20 0 -20 50 0 -50 500 0 -500
V V V V V
! Reward prediction error (t)
=0 = 0.3 = 0.6 = 0.8 = 0.9 = 0.99
delta delta delta delta delta
1
trial
312
44
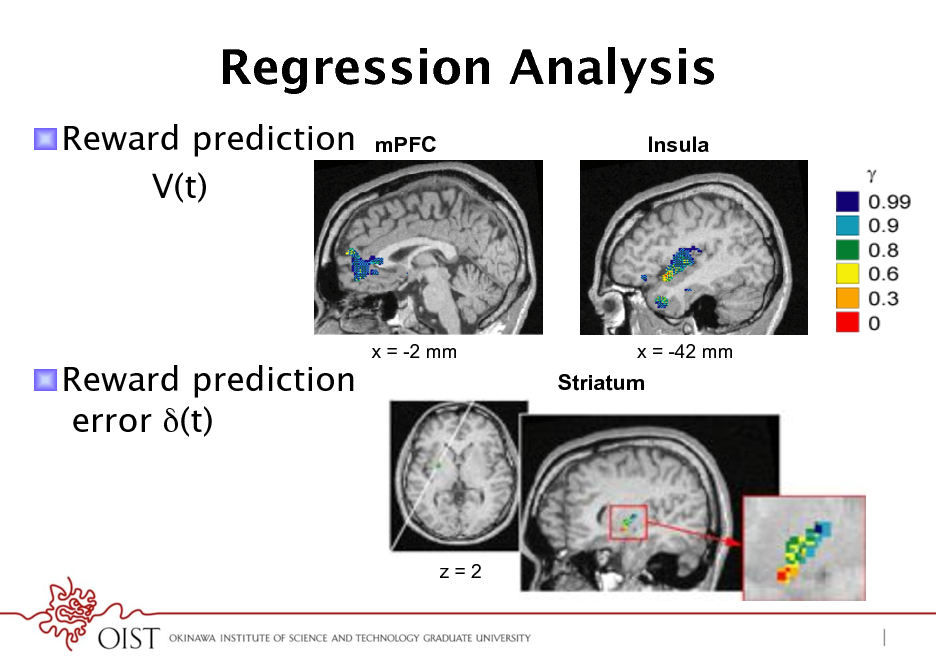
Regression Analysis
! Reward prediction V(t)
mPFC Insula
! Reward prediction error (t)
x = -2 mm
x = -42 mm
Striatum
z=2
45
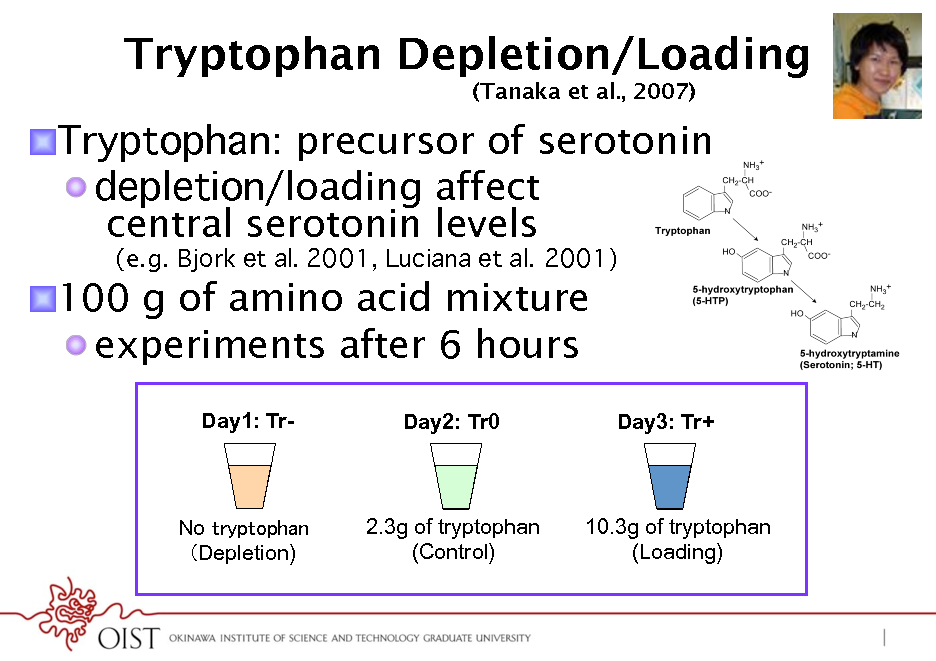
Tryptophan Depletion/Loading
(Tanaka et al., 2007)
! Tryptophan: precursor of serotonin ! depletion/loading affect central serotonin levels
(e.g. Bjork et al. 2001, Luciana et al. 2001)
! 100 g of amino acid mixture ! experiments after 6 hours
Day1: TrDay2: Tr0
Day3: Tr+
No Depletion)
2.3g of tryptophan (Control)
10.3g of tryptophan (Loading)
46
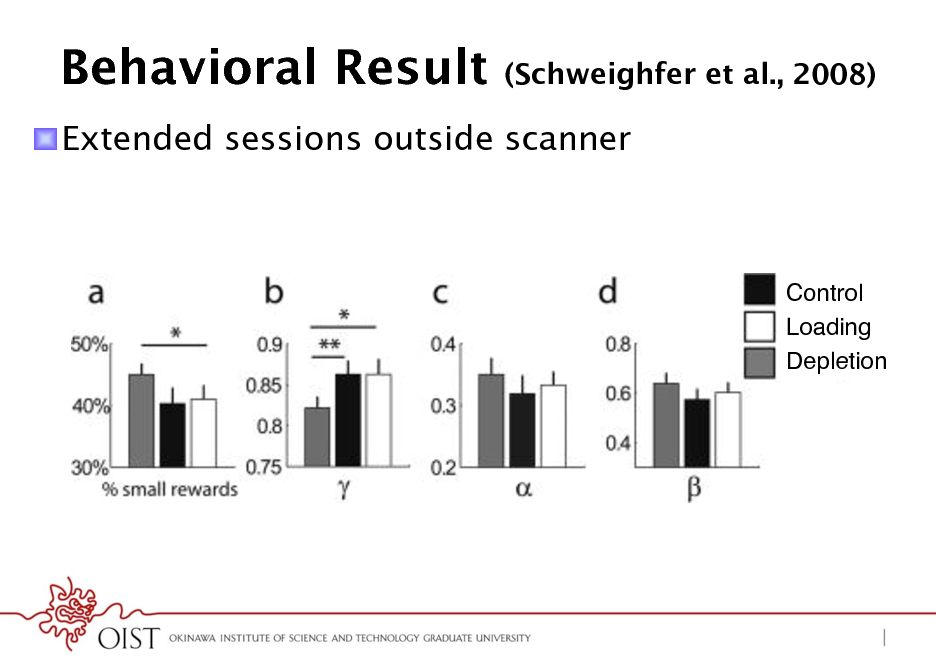
Behavioral Result
(Schweighfer et al., 2008)
! Extended sessions outside scanner
Control! Loading! Depletion!
47
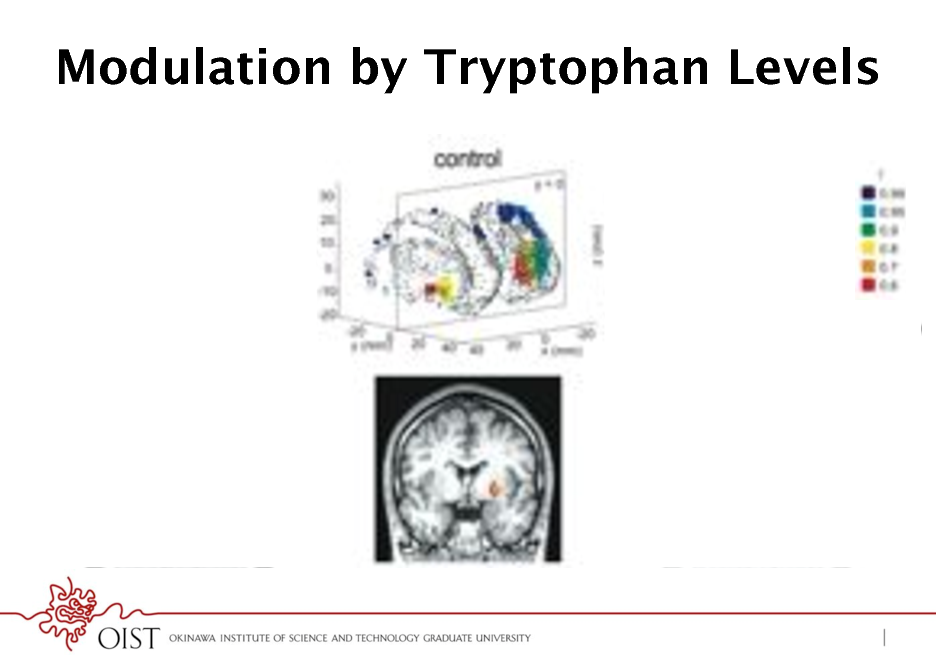
Modulation by Tryptophan Levels
48
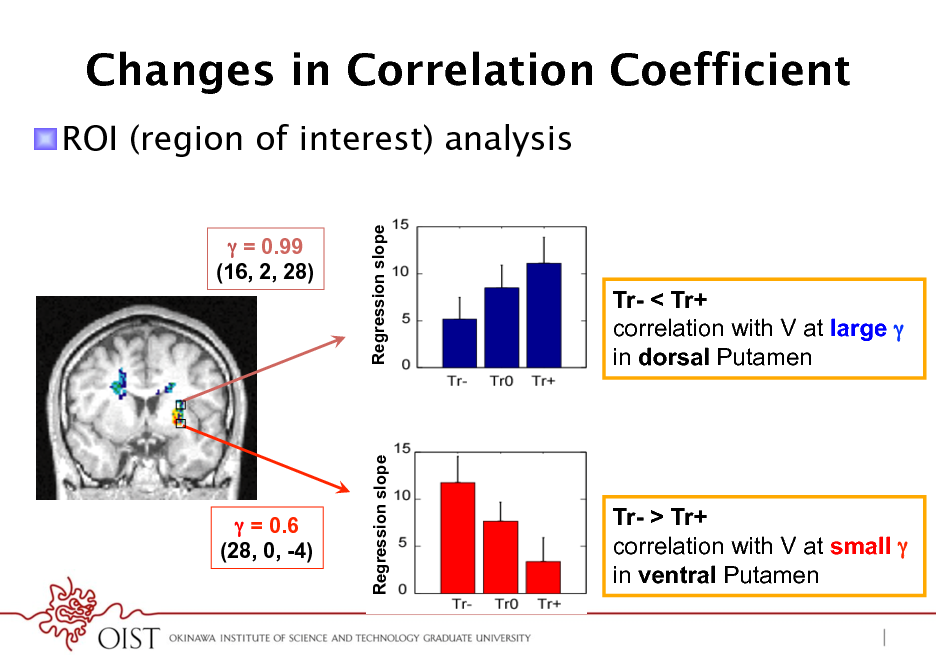
Changes in Correlation Coefficient
! ROI (region of interest) analysis
= 0.99 (16, 2, 28)
Regression slope
Tr- < Tr+ correlation with V at large in dorsal Putamen
Regression slope
= 0.6 (28, 0, -4)
Tr- > Tr+ correlation with V at small in ventral Putamen
49
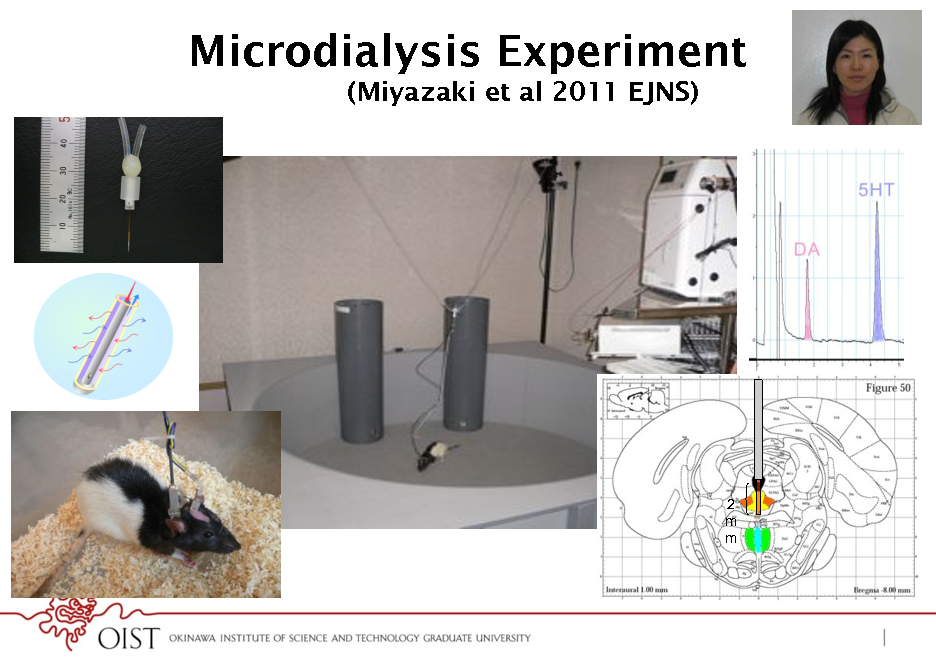
Microdialysis Experiment
(Miyazaki et al 2011 EJNS)
2 m m
50
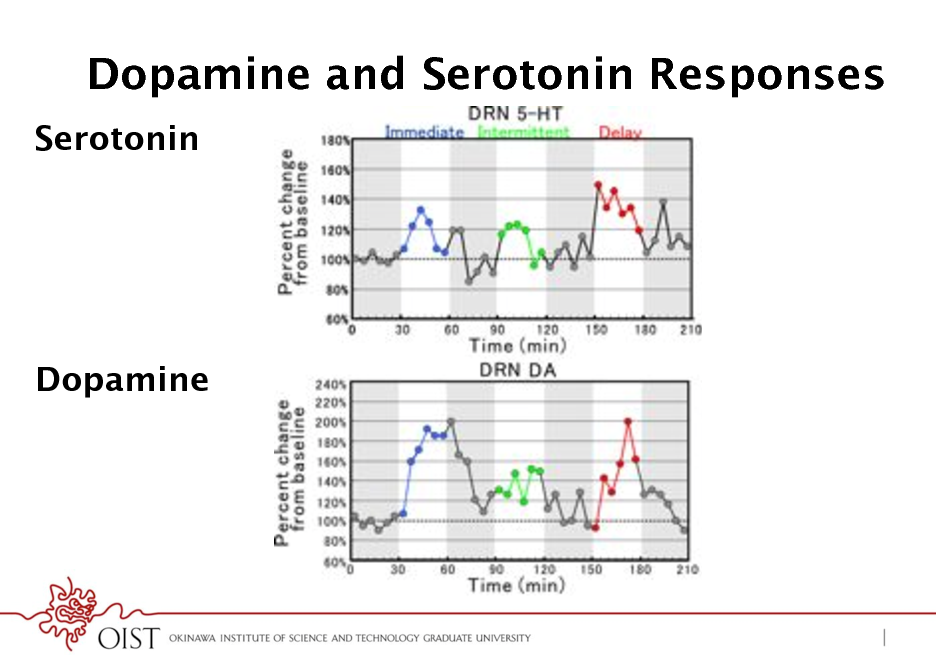
Dopamine and Serotonin Responses
Serotonin
Dopamine
51
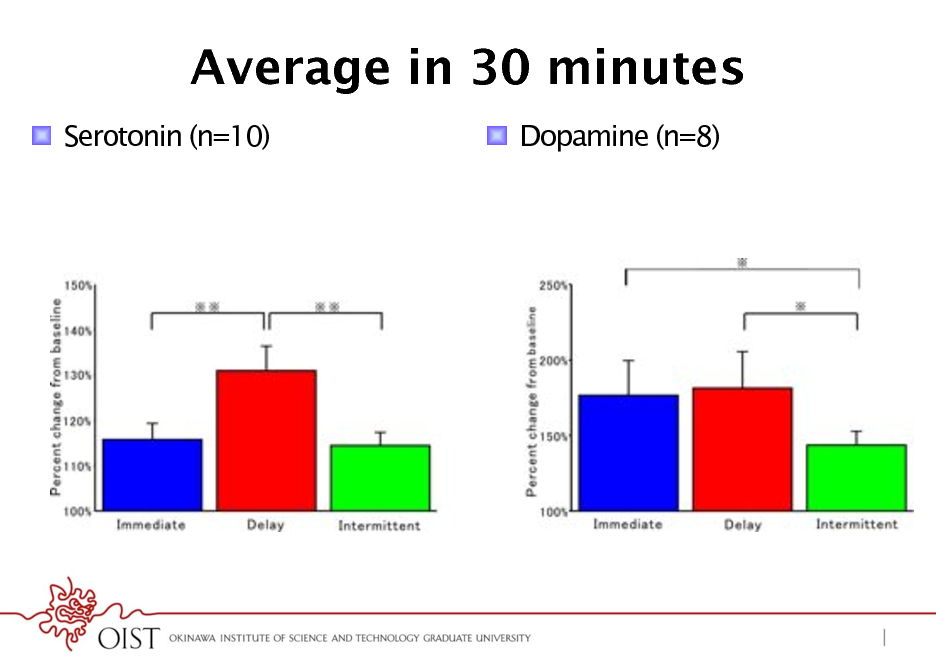
Average in 30 minutes
! Serotonin (n=10) ! Dopamine (n=8)
52
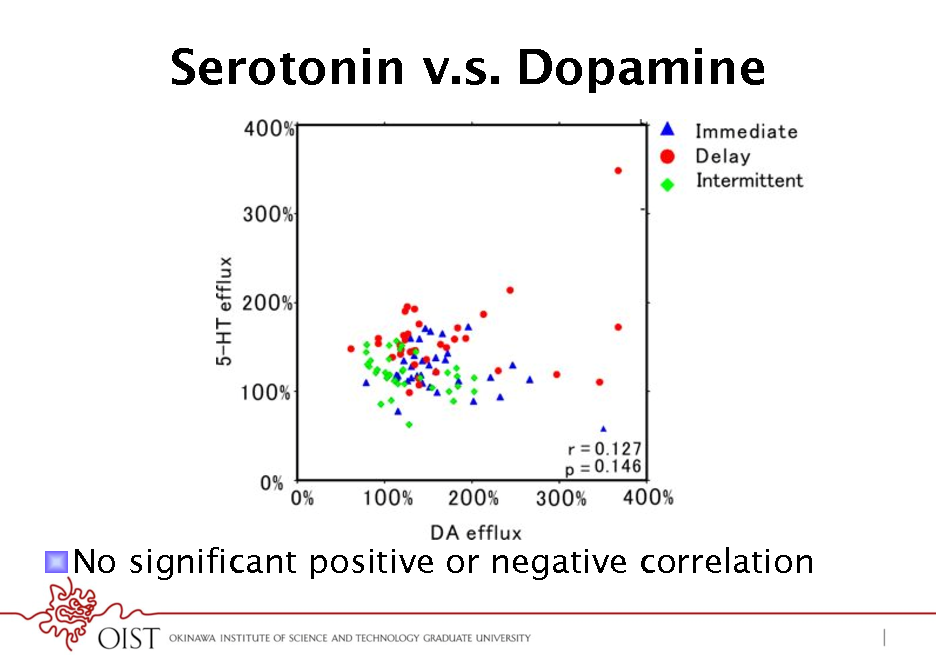
Serotonin v.s. Dopamine
Immediate Delayed Intermittent
! No significant positive or negative correlation
53
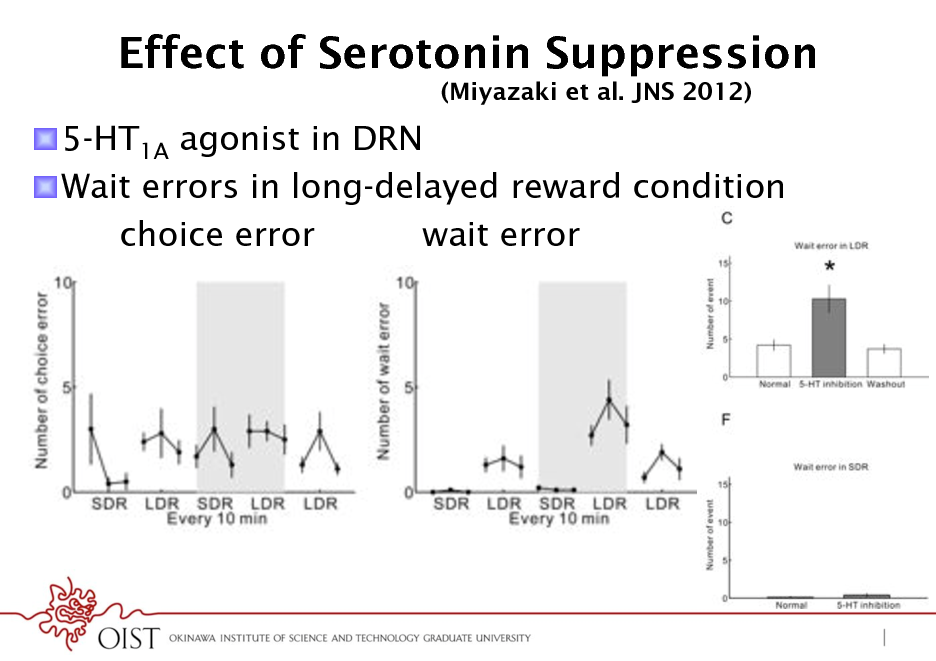
Effect of Serotonin Suppression
(Miyazaki et al. JNS 2012)
! 5-HT1A agonist in DRN ! Wait errors in long-delayed reward condition choice error wait error
54
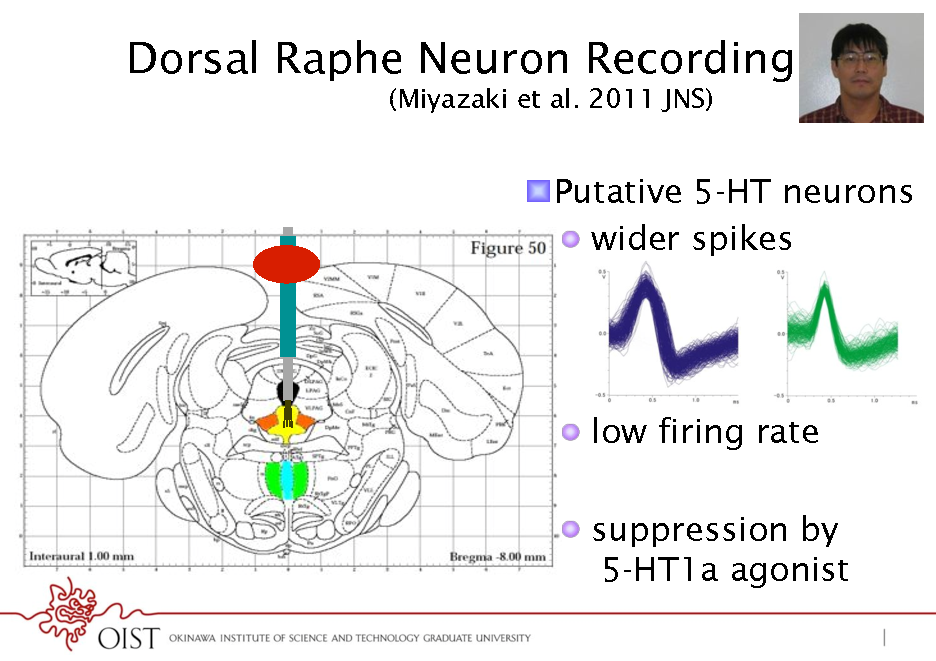
Dorsal Raphe Neuron Recording (Miyazaki et al. 2011 JNS)
! Putative 5-HT neurons ! wider spikes
! low firing rate ! suppression by 5-HT1a agonist
55
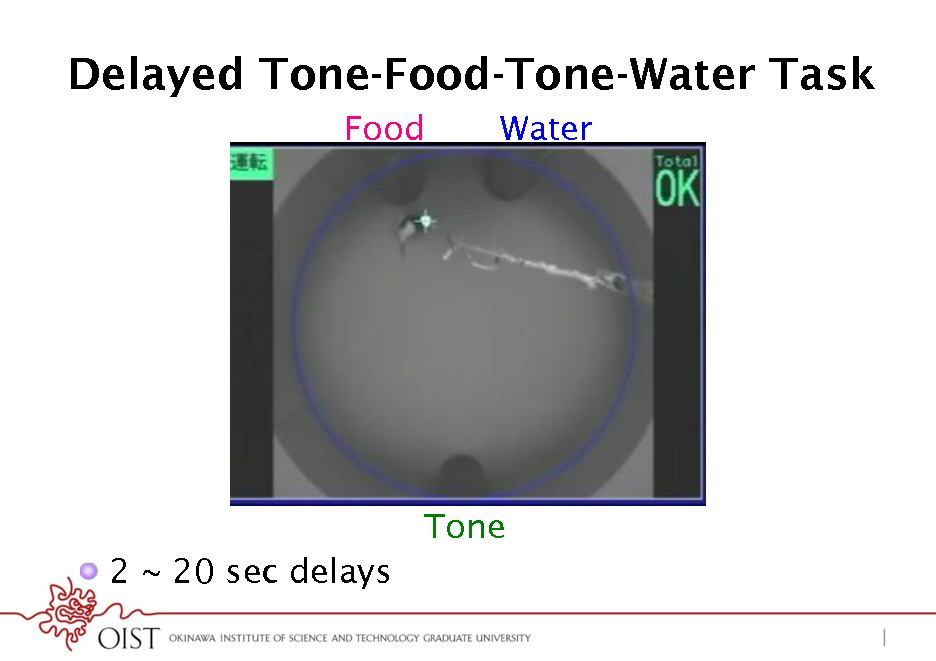
Delayed Tone-Food-Tone-Water Task
Food Water
Tone ! 2 ~ 20 sec delays
56
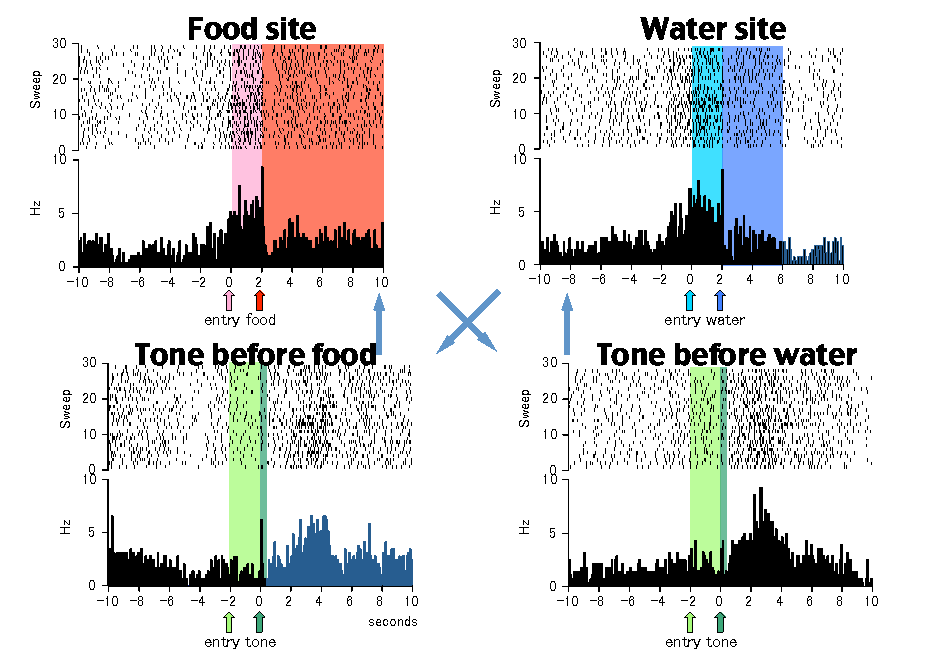
Food site!
Water site!
Tone before food!
Tone before water!
57
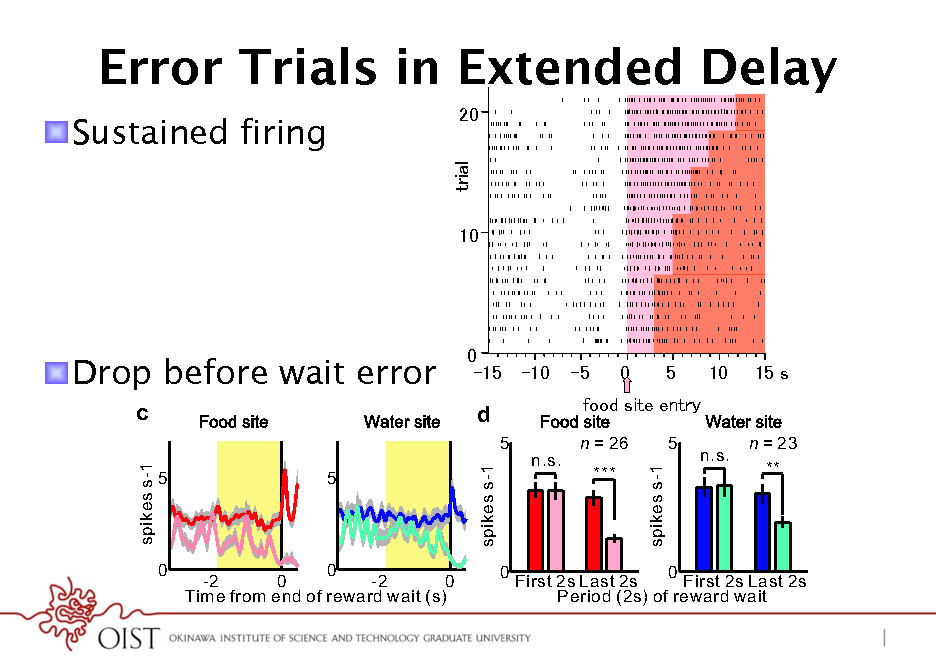
Error Trials in Extended Delay
0 0 5 Time (s) 0 5 10 Time (s) 15 0 0 5 Time (s) 0 5 10 Time (s) 15
! SustainedTone site firing b
Trial
10
Food site
Tone site
Water site
0
Trial
0 5 Time (s) 0 5 Time (s)
10
0
! Drop before wait error
c
spikes s-1
5 5
0
5 Time (s)
0 5 Time (s)
d
5 n = 26 5
spikes s-1
***
0
0 -2 0 -2 0 Time from end of reward wait (s)
0
0 First 2s Last 2s First 2s Last 2s Period (2s) of reward wait
e
spikes s-1
n.s.
n.s.
n = 23 **
58
Serotonin Experiments: Summary
! Microdialysis ! higher release for delayed reward ! no apparent opponency with dopamine ! lower release cause waiting error Consistent with discounting hypothesis ! Serotonin neuron recording ! higher firing during waiting ! firing stops before giving up More dynamic variable than a parameter ! Question: regulation of serotonin neurons ! algorithm for regulation of patience
59
Collaborators
! ATR Tamagawa U ! Kyoto PUM ! Kazuyuki Samejima ! Minoru Kimura ! NAISTCalTechATROsaka U ! Yasumasa Ueda ! Saori Tanaka ! Hiroshima U ! CREST USC ! Shigeto Yamawaki ! Nicolas Schweighofer ! Yasumasa Okamoto ! OIST ! Go Okada ! Makoto Ito ! Kazutaka Ueda ! Kayoko Miyazaki ! Shuji Asahi ! Katsuhiko Miyazaki ! Kazuhiro Shishida ! Takashi Nakano ! Jun Yoshimoto ! U Otago OIST ! Eiji Uchibe ! Jeff Wickens ! Stefan Elfwing
60