Statistical Learning Theory
Machine Learning Summer School, Kyoto, Japan
Alexander (Sasha) Rakhlin
University of Pennsylvania, The Wharton School Penn Research in Machine Learning (PRiML)
August 27-28, 2012
1 / 130
The goal of Statistical Learning is to explain the performance of existing learning methods and to provide guidelines for the development of new algorithms. This tutorial will give an overview of this theory. We will discuss mathematical definitions of learning, the complexities involved in achieving good performance, and connections to other fields, such as statistics, probability, and optimization. Topics will include basic probabilistic inequalities for the risk, the notions of Vapnik-Chervonenkis dimension and the uniform laws of large numbers, Rademacher averages and covering numbers. We will briefly discuss sequential prediction methods.
Scroll with j/k | | | Size
Statistical Learning Theory
Machine Learning Summer School, Kyoto, Japan
Alexander (Sasha) Rakhlin
University of Pennsylvania, The Wharton School Penn Research in Machine Learning (PRiML)
August 27-28, 2012
1 / 130
1
References
Parts of these lectures are based on O. Bousquet, S. Boucheron, G. Lugosi: Introduction to Statistical Learning Theory, 2004. MLSS notes by O. Bousquet S. Mendelson: A Few Notes on Statistical Learning Theory Lecture notes by S. Shalev-Shwartz Lecture notes (S. R. and K. Sridharan)
http://stat.wharton.upenn.edu/~rakhlin/courses/stat928/stat928_notes.pdf
Prerequisites: a basic familiarity with Probability is assumed.
2 / 130
2
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
3 / 130
3
Example #1: Handwritten Digit Recognition
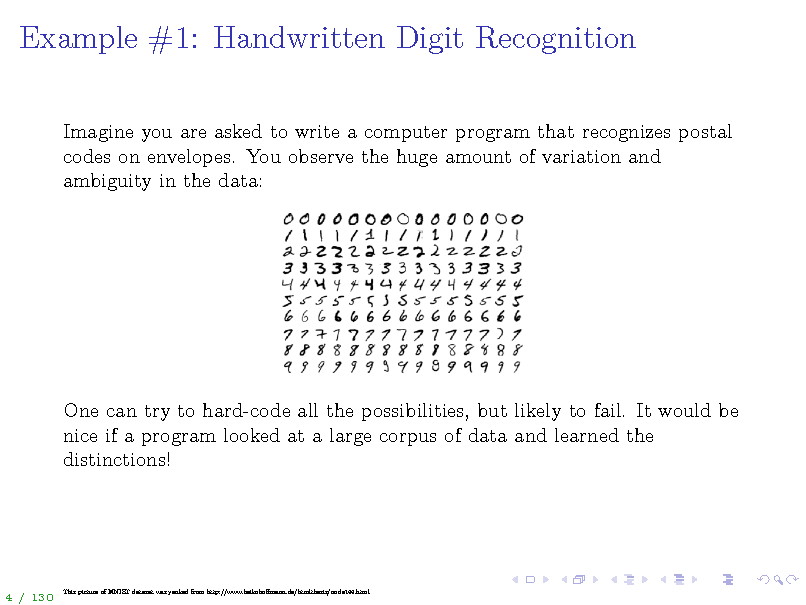
Imagine you are asked to write a computer program that recognizes postal codes on envelopes. You observe the huge amount of variation and ambiguity in the data:
One can try to hard-code all the possibilities, but likely to fail. It would be nice if a program looked at a large corpus of data and learned the distinctions!
4 / 130
This picture of MNIST dataset was yanked from http://www.heikohomann.de/htmlthesis/node144.html
4
Example #1: Handwritten Digit Recognition
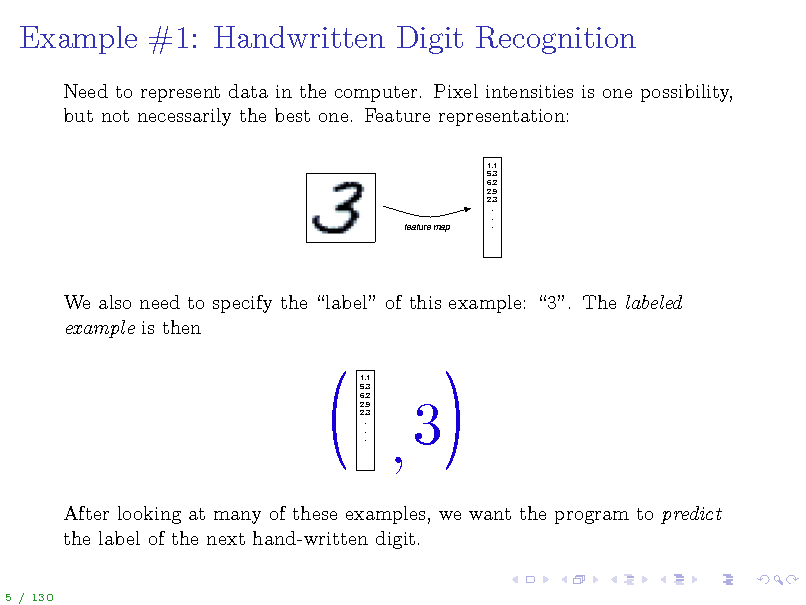
Need to represent data in the computer. Pixel intensities is one possibility, but not necessarily the best one. Feature representation:
feature map
We also need to specify the label of this example: 3. The labeled example is then
1.1 5.3 6.2 2.9 2.3 . . .
After looking at many of these examples, we want the program to predict the label of the next hand-written digit.
5 / 130
(
,3
(
1.1 5.3 6.2 2.9 2.3 . . .
5
Example #2: Predict Topic of a News Article
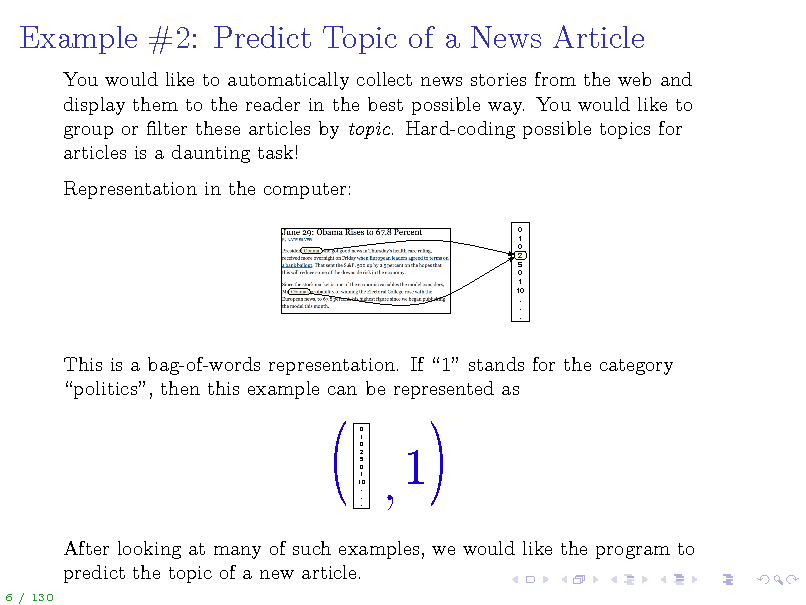
You would like to automatically collect news stories from the web and display them to the reader in the best possible way. You would like to group or lter these articles by topic. Hard-coding possible topics for articles is a daunting task! Representation in the computer:
0 1 0 2 5 0 1 10 . . .
This is a bag-of-words representation. If 1 stands for the category politics, then this example can be represented as
0 1 0 2 5 0 1 10 . . .
After looking at many of such examples, we would like the program to predict the topic of a new article.
6 / 130
(
,1
(
6
Why Machine Learning?
Impossible to hard-code all the knowledge into a computer program. The systems need to be adaptive to the changes in the environment. Examples: Computer vision: face detection, face recognition Audio: voice recognition, parsing Text: document topics, translation Ad placement on web pages Movie recommendations Email spam detection
7 / 130
7
Machine Learning
(Human) learning is the process of acquiring knowledge or skill. Quite vague. How can we build a mathematical theory for something so imprecise? Machine Learning is concerned with the design and analysis of algorithms that improve performance after observing data. That is, the acquired knowledge comes from data. We need to make mathematically precise the following terms: performance, improve, data.
8 / 130
8
Learning from Examples
How is it possible to conclude something general from specic examples? Learning is inherently an ill-posed problem, as there are many alternatives that could be consistent with the observed examples. Learning can be seen as the process of induction (as opposed to deduction): extrapolating from examples. Prior knowledge is how we make the problem well-posed. Memorization is not learning, not induction. Our theory should make this apparent. Very important to delineate assumptions. Then we will be able to prove mathematically that certain learning algorithms perform well.
9 / 130
9
Data
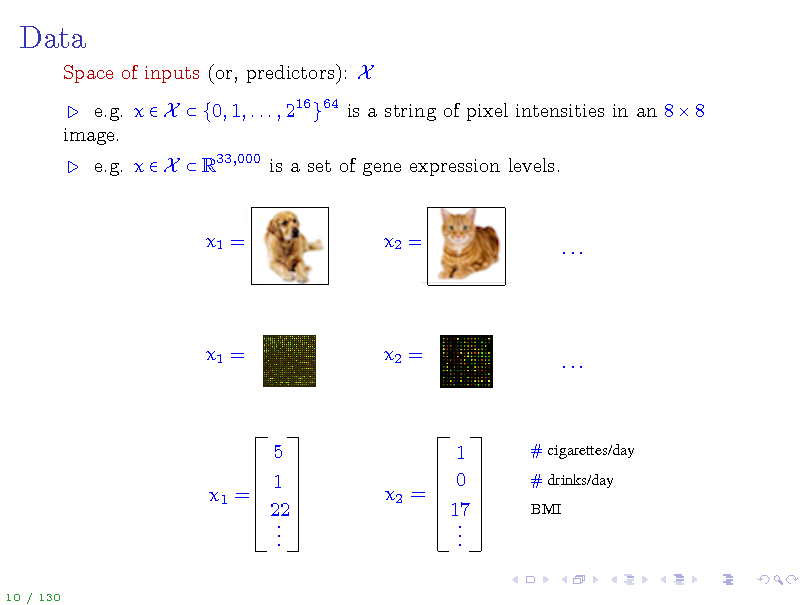
Space of inputs (or, predictors): X e.g. x X {0, 1, . . . , 216 }64 is a string of pixel intensities in an 8 8 image. e.g. x X R33,000 is a set of gene expression levels.
x1 =
x2 =
...
x1 =
x2 =
...
x1 =
5 1 22 ...
x2 =
1 0 17 ...
# cigarettes/day # drinks/day BMI
10 / 130
10

Data
Sometimes the space X is uniquely dened for the problem. In other cases, such as in vision/text/audio applications, many possibilities exist, and a good feature representation is key to obtaining good performance.
This important part of machine learning applications will not be discussed in this lecture, and we will assume that X has been chosen by the practitioner.
11 / 130
11
![Slide: Data
Space of outputs (or, responses): Y e.g. y Y = {0, 1} is a binary label (1 = cat) e.g. y Y = [0, 200] is life expectancy A pair (x, y) is a labeled example. e.g. (x, y) is an example of an image with a label y = 1, which stands for the presence of a face in the image x Dataset (or training data): examples (x1 , y1 ), . . . , (xn , yn ) e.g. a collection of images labeled according to the presence or absence of a face
12 / 130](https://yosinski.com/mlss12/media/slides/MLSS-2012-Rakhlin-Statistical-Learning-Theory_012.png)
Data
Space of outputs (or, responses): Y e.g. y Y = {0, 1} is a binary label (1 = cat) e.g. y Y = [0, 200] is life expectancy A pair (x, y) is a labeled example. e.g. (x, y) is an example of an image with a label y = 1, which stands for the presence of a face in the image x Dataset (or training data): examples (x1 , y1 ), . . . , (xn , yn ) e.g. a collection of images labeled according to the presence or absence of a face
12 / 130
12
The Multitude of Learning Frameworks
Presence/absence of labeled data: Supervised Learning: (x1 , y1 ), . . . , (xn , yn ) Unsupervised Learning: x1 , . . . , xn Semi-supervised Learning: a mix of the above This distinction is important, as labels are often dicult or expensive to obtain (e.g. can collect a large corpus of emails, but which ones are spam?) Types of labels: Binary Classication / Pattern Recognition: Y = {0, 1} Multiclass: Y = {0, . . . , K} Regression: Y R Structure prediction: Y is a set of complex objects (graphs, translations)
13 / 130
13
The Multitude of Learning Frameworks
Problems also dier in the protocol for obtaining data: Passive Active and in assumptions on data: Batch (typically i.i.d.) Online (i.i.d. or worst-case or some stochastic process) Even more involved: Reinforcement Learning and other frameworks.
14 / 130
14
Why Theory?
... theory is the rst term in the Taylor series of practice Thomas M. Cover, 1990 Shannon Lecture
Theory and Practice should go hand-in-hand. Boosting, Support Vector Machines came from theoretical considerations. Sometimes, theory is suggesting practical methods, sometimes practice comes ahead and theory tries to catch up and explain the performance.
15 / 130
15
This tutorial
First 2 3 of the tutorial: we will study the problem of supervised learning (with a focus on binary classication) with an i.i.d. assumption on the data.
The last 1 3 of the tutorial: we will turn to online learning without the i.i.d. assumption.
16 / 130
16
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
17 / 130
17
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
18 / 130
18
![Slide: Statistical Learning Theory
The variable x is related to y, and we would like to learn this relationship from data. The relationship is encapsulated by a distribution P on X Y. Example: x = [weight, blood glucose, . . .] and y is the risk of diabetes. We assume there is a relationship between x and y: it is less likely to see certain x co-occur with low risk and unlikely to see some other x co-occur with high risk. This relationship is encapsulated by P(x, y).
This is an assumption about the population of all (x, y). However, what we see is a sample.
19 / 130](https://yosinski.com/mlss12/media/slides/MLSS-2012-Rakhlin-Statistical-Learning-Theory_019.png)
Statistical Learning Theory
The variable x is related to y, and we would like to learn this relationship from data. The relationship is encapsulated by a distribution P on X Y. Example: x = [weight, blood glucose, . . .] and y is the risk of diabetes. We assume there is a relationship between x and y: it is less likely to see certain x co-occur with low risk and unlikely to see some other x co-occur with high risk. This relationship is encapsulated by P(x, y).
This is an assumption about the population of all (x, y). However, what we see is a sample.
19 / 130
19
Statistical Learning Theory
Data denoted by (x1 , y1 ), . . . , (xn , yn ) , where n is the sample size. The distribution P is unknown to us (otherwise, there is no learning to be done). The observed data are sampled independently from P (the i.i.d. assumption) It is often helpful to write P = Px Py x . The distribution Px on the inputs is called the marginal distribution, while Py x is the conditional distribution.
20 / 130
20
Statistical Learning Theory
Upon observing the training data (x1 , y1 ), . . . , (xn , yn ) , the learner is asked to summarize what she had learned about the relationship between x and y. The learners summary takes the form of a function fn X indicates that this function depends on the training data. Y. The hat
Learning algorithm: a mapping {(x1 , y1 ), . . . , (xn , yn )} fn .
The quality of the learned relationship is given by comparing the response fn (x) to y for a pair (x, y) independently drawn from the same distribution P: E(x,y) (fn (x), y) where Y Y R is a loss function. This is our measure of performance.
21 / 130
21
Loss Functions
Indicator loss (classication): (y, y ) = I{yy } Square loss: (y, y ) = (y y )2 Absolute loss: (y, y ) = y y
22 / 130
22
Examples
Probably the simplest learning algorithm that you are probably familiar with is linear least squares: Given (x1 , y1 ), . . . , (xn , yn ), let 1 n = arg min (yi , xi )2 Rd n i=1 and dene fn (x) = , x Another basic method is regularized least squares: 1 n = arg min (yi , xi )2 + Rd n i=1
2
23 / 130
23
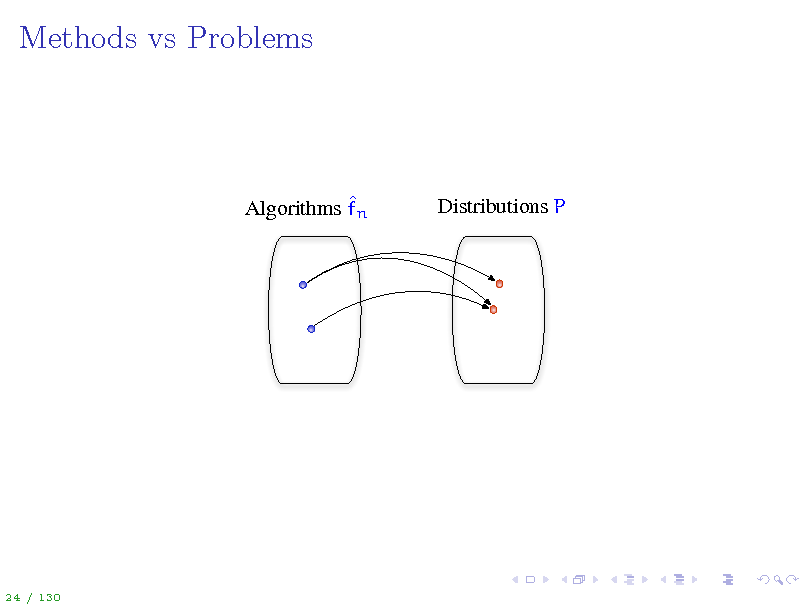
Methods vs Problems
Algorithms fn
Distributions P
24 / 130
24
Expected Loss and Empirical Loss
The expected loss of any function f X
Y is
L(f) = E (f(x), y)
Since P is unknown, we cannot calculate L(f). However, we can calculate the empirical loss of f X 1 n L(f) = (f(xi ), yi ) n i=1 Y
25 / 130
25
... again, what is random here?
Since data (x1 , y1 ), . . . , (xn , yn ) are a random i.i.d. draw from P, L(f) is a random quantity fn is a random quantity (a random function, output of our learning procedure after seeing data) hence, L(fn ) is also a random quantity for a given f X Y, the quantity L(f) is not random!
It is important that these are understood before we proceed further.
26 / 130
26
The Gold Standard
Within the framework we set up, the smallest expected loss is achieved by the Bayes optimal function f = arg min L(f)
f
where the minimization is over all (measurable) prediction rules f X The value of the lowest expected loss is called the Bayes error: L(f ) = inf L(f)
f
Y.
Of course, we cannot calculate any of these quantities since P is unknown.
27 / 130
27
![Slide: Bayes Optimal Function
Bayes optimal function f takes on the following forms in these two particular cases: Binary classication (Y = {0, 1}) with the indicator loss: f (x) = I{(x)1
1 (x) 0
2} ,
where
(x) = E[Y X = x]
28 / 130](https://yosinski.com/mlss12/media/slides/MLSS-2012-Rakhlin-Statistical-Learning-Theory_028.png)
Bayes Optimal Function
Bayes optimal function f takes on the following forms in these two particular cases: Binary classication (Y = {0, 1}) with the indicator loss: f (x) = I{(x)1
1 (x) 0
2} ,
where
(x) = E[Y X = x]
28 / 130
28
![Slide: Bayes Optimal Function
Bayes optimal function f takes on the following forms in these two particular cases: Binary classication (Y = {0, 1}) with the indicator loss: f (x) = I{(x)1
1 (x) 0
2} ,
where
(x) = E[Y X = x]
Regression (Y = R) with squared loss: f (x) = (x), where (x) = E[Y X = x]
28 / 130](https://yosinski.com/mlss12/media/slides/MLSS-2012-Rakhlin-Statistical-Learning-Theory_029.png)
Bayes Optimal Function
Bayes optimal function f takes on the following forms in these two particular cases: Binary classication (Y = {0, 1}) with the indicator loss: f (x) = I{(x)1
1 (x) 0
2} ,
where
(x) = E[Y X = x]
Regression (Y = R) with squared loss: f (x) = (x), where (x) = E[Y X = x]
28 / 130
29
The big question: is there a way to construct a learning algorithm with a guarantee that L(fn ) L(f ) is small for large enough sample size n?
29 / 130
30
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
30 / 130
31
Consistency
An algorithm that ensures
n
lim L(fn ) = L(f )
almost surely
is called consistent. Consistency ensures that our algorithm is approaching the best possible prediction performance as the sample size increases. The good news: consistency is possible to achieve. easy if X is a nite or countable set not too hard if X is innite, and the underlying relationship between x and y is continuous
31 / 130
32
The bad news...
In general, we cannot prove anything interesting about L(fn ) L(f ), unless we make further assumptions (incorporate prior knowledge). What do we mean by nothing interesting? This is the subject of the so-called No Free Lunch Theorems. Unless we posit further assumptions,
32 / 130
33
The bad news...
In general, we cannot prove anything interesting about L(fn ) L(f ), unless we make further assumptions (incorporate prior knowledge). What do we mean by nothing interesting? This is the subject of the so-called No Free Lunch Theorems. Unless we posit further assumptions, For any algorithm fn , any n and any > 0, there exists a distribution P such that L(f ) = 0 and EL(fn ) 1 2
32 / 130
34
The bad news...
In general, we cannot prove anything interesting about L(fn ) L(f ), unless we make further assumptions (incorporate prior knowledge). What do we mean by nothing interesting? This is the subject of the so-called No Free Lunch Theorems. Unless we posit further assumptions, For any algorithm fn , any n and any > 0, there exists a distribution P such that L(f ) = 0 and EL(fn ) 1 2
For any algorithm fn , and any sequence an that converges to 0, there exists a probability distribution P such that L(f ) = 0 and for all n EL(fn ) an
Reference: (Devroye, Gyr, Lugosi: A Probabilistic Theory of Pattern Recognition), o (Bousquet, Boucheron, Lugosi, 2004)
32 / 130
35
is this really bad news?
Not really. We always have some domain knowledge. Two ways of incorporating prior knowledge: Direct way: assume that the distribution P is not arbitrary (also known as a modeling approach, generative approach, statistical modeling) Indirect way: redene the goal to perform as well as a reference set F of predictors: L(fn ) inf L(f)
fF
This is known as a discriminative approach. F encapsulates our inductive bias.
33 / 130
36
Pros/Cons of the two approaches
Pros of the discriminative approach: we never assume that P takes some particular form, but we rather put our prior knowledge into what are the types of predictors that will do well. Cons: cannot really interpret fn .
Pros of the generative approach: can estimate the model / parameters of the distribution (inference). Cons: it is not clear what the analysis says if the assumption is actually violated.
Both approaches have their advantages. A machine learning researcher or practitioner should ideally know both and should understand their strengths and weaknesses. In this tutorial we only focus on the discriminative approach.
34 / 130
37
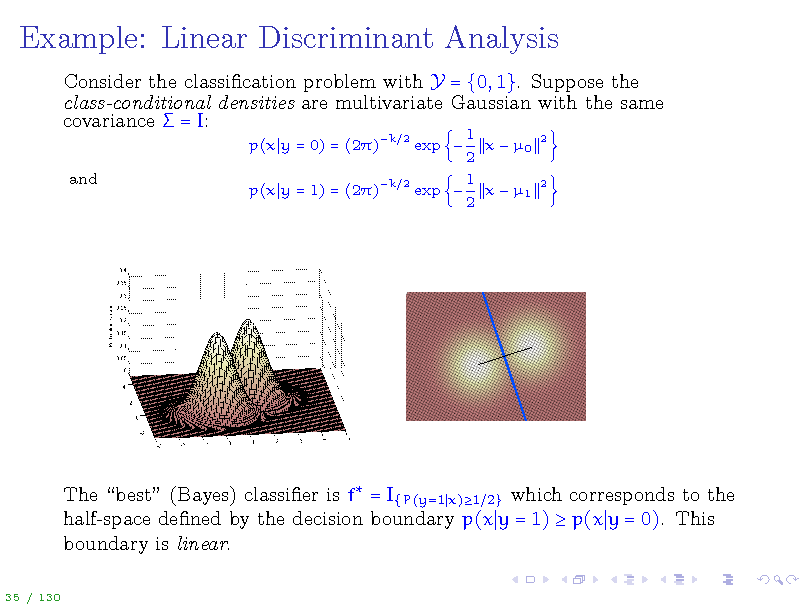
Example: Linear Discriminant Analysis
Consider the classication problem with Y = {0, 1}. Suppose the class-conditional densities are multivariate Gaussian with the same covariance = I:
p(x y = 0) = (2) and p(x y = 1) = (2)
k 2 k
1 x 0 2 1 2 exp x 1 2 exp
2
2
The best (Bayes) classier is f = I{P(y=1 x)1 2} which corresponds to the half-space dened by the decision boundary p(x y = 1) p(x y = 0). This boundary is linear.
35 / 130
38
Example: Linear Discriminant Analysis
The (linear) optimal decision boundary comes from our generative assumption on the form of the underlying distribution. Alternatively, we could have indirectly postulated that we will be looking for a linear discriminant between the two classes, without making distributional assumptions. Such linear discriminant (classication) functions are I{ w,x b} for a unit-norm w and some bias b R. Quadratic Discriminant Analysis: If unequal correlation matrices 1 and 2 are assumed, the resulting boundary is quadratic. We can then dene classication function by I{q(x)0} where q(x) is a quadratic function.
36 / 130
39
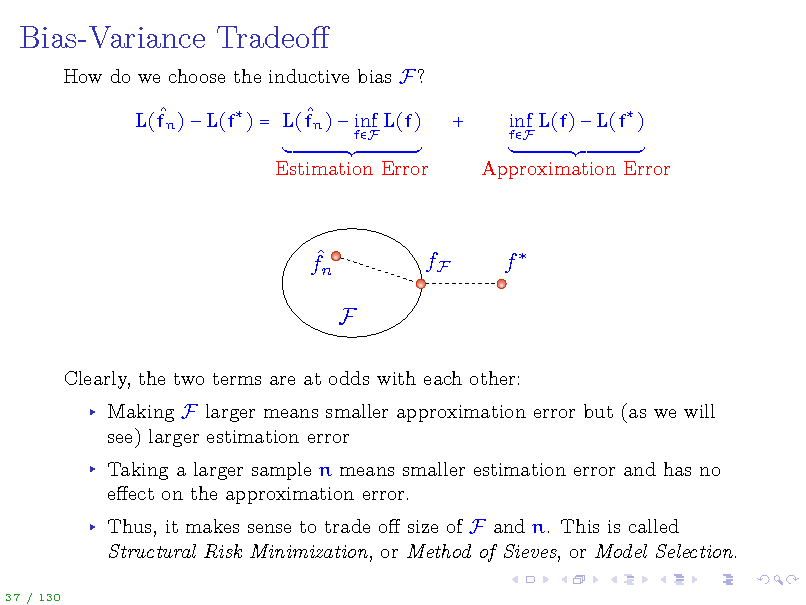
Bias-Variance Tradeo
How do we choose the inductive bias F? L(fn ) L(f ) = L(fn ) inf L(f)
fF
+
fF
inf L(f) L(f )
Estimation Error
Approximation Error
fn F
fF
f
Clearly, the two terms are at odds with each other: Making F larger means smaller approximation error but (as we will see) larger estimation error Taking a larger sample n means smaller estimation error and has no eect on the approximation error. Thus, it makes sense to trade o size of F and n. This is called Structural Risk Minimization, or Method of Sieves, or Model Selection.
37 / 130
40
Bias-Variance Tradeo
We will only focus on the estimation error, yet the ideas we develop will make it possible to read about model selection on your own. Note: if we guessed correctly and f F, then L(fn ) L(f ) = L(fn ) inf L(f)
fF
For a particular problem, one hopes that prior knowledge about the problem can ensure that the approximation error inf fF L(f) L(f ) is small.
38 / 130
41
Occams Razor
Occams Razor is often quoted as a principle for choosing the simplest theory or explanation out of the possible ones. However, this is a rather philosophical argument since simplicity is not uniquely dened. We will discuss this issue later. What we will do is to try to understand complexity when it comes to behavior of certain stochastic processes. Such a question will be well-dened mathematically.
39 / 130
42
Looking Ahead
So far: represented prior knowledge by means of the class F. Looking forward, we can nd an algorithm that, after looking at a dataset of size n, produces fn such that L(fn ) inf L(f)
fF
decreases (in a certain sense which we will make precise) at a non-trivial rate which depends on richness of F. This will give a sample complexity guarantee: how many samples are needed to make the error smaller than a desired accuracy.
40 / 130
43
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
41 / 130
44
Types of Bounds
In expectation vs in probability (control the mean vs control the tails): E L(fn ) inf L(f) < (n)
fF
vs
P L(fn ) inf L(f)
fF
< (n, )
42 / 130
45
Types of Bounds
In expectation vs in probability (control the mean vs control the tails): E L(fn ) inf L(f) < (n)
fF
vs
P L(fn ) inf L(f)
fF
< (n, )
The in-probability bound can be inverted as P L(fn ) inf L(f) (, n) <
fF
by setting = ( , n) and solving for . In this lecture, we are after the function (, n). We will call it the rate. With high probability typically means logarithmic dependence of (, n) on 1 . Very desirable: the bound grows only modestly even for high condence bounds.
42 / 130
46
Sample Complexity
Sample complexity is the sample size required by the algorithm fn to guarantee L(fn ) inf fF L(f) with probability at least 1 . Of course, we just need to invert a bound P L(fn ) inf L(f) (, n) <
fF
by setting = (, n) and solving for n. In other words, n( , ) is sample complexity of the algorithm fn if P L(fn ) inf L(f)
fF
as soon as n n( , ). Hence, rate can be translated into sample complexity and vice versa. Easy to remember: rate O(1 n) means O(1 2 ) sample complexity, whereas rate O(1 n) is a smaller O(1 ) sample complexity.
43 / 130
47
Types of Bounds
Other distinctions to keep in mind: We can ask for bounds (either in expectation or in probability) on the following random variables: L(fn ) L(f ) (A)
L(fn ) inf L(f)
fF
(B)
L(fn ) L(fn )
(C)
sup L(f) L(f)
fF
(D)
sup L(f) L(f) penn (f)
fF
(E)
Lets make sure we understand the dierences between these random quantities!
44 / 130
48
Types of Bounds
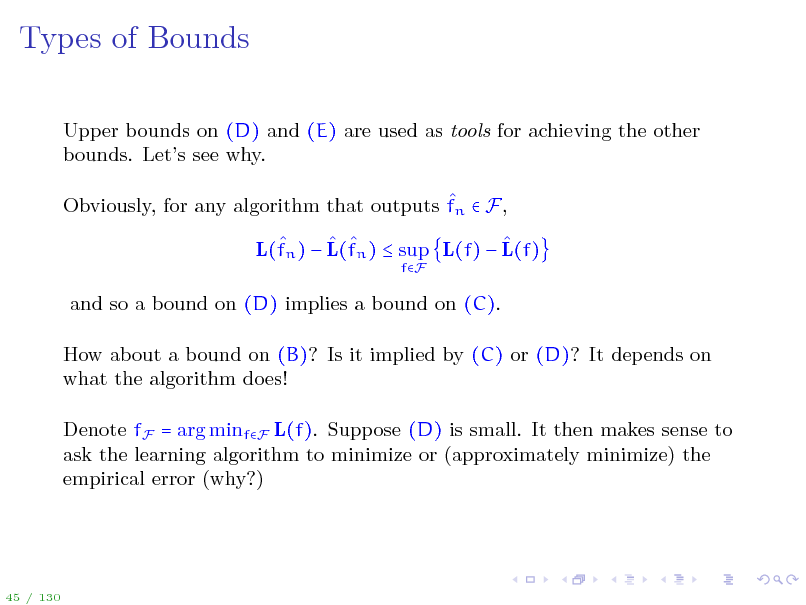
Upper bounds on (D) and (E) are used as tools for achieving the other bounds. Lets see why. Obviously, for any algorithm that outputs fn F, L(fn ) L(fn ) sup L(f) L(f)
fF
and so a bound on (D) implies a bound on (C). How about a bound on (B)? Is it implied by (C) or (D)? It depends on what the algorithm does! Denote fF = arg minfF L(f). Suppose (D) is small. It then makes sense to ask the learning algorithm to minimize or (approximately minimize) the empirical error (why?)
45 / 130
49
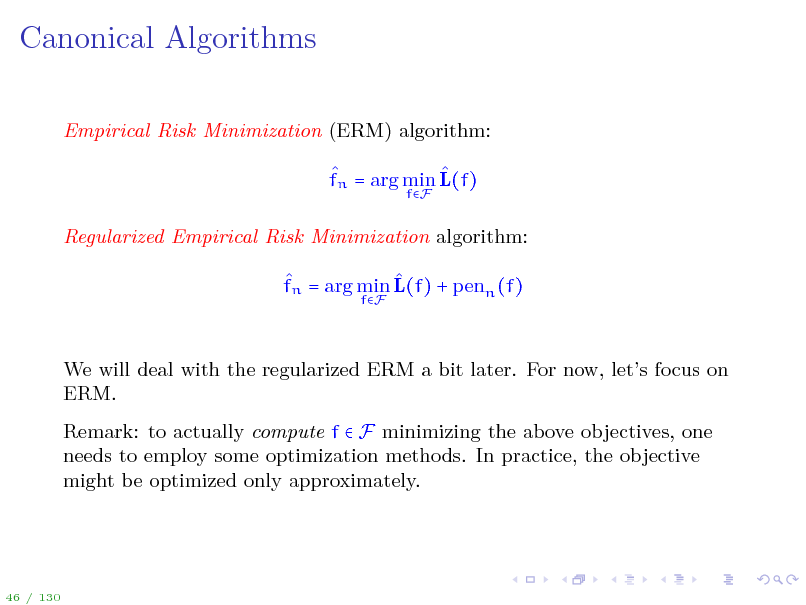
Canonical Algorithms
Empirical Risk Minimization (ERM) algorithm: fn = arg min L(f)
fF
Regularized Empirical Risk Minimization algorithm: fn = arg min L(f) + penn (f)
fF
We will deal with the regularized ERM a bit later. For now, lets focus on ERM. Remark: to actually compute f F minimizing the above objectives, one needs to employ some optimization methods. In practice, the objective might be optimized only approximately.
46 / 130
50
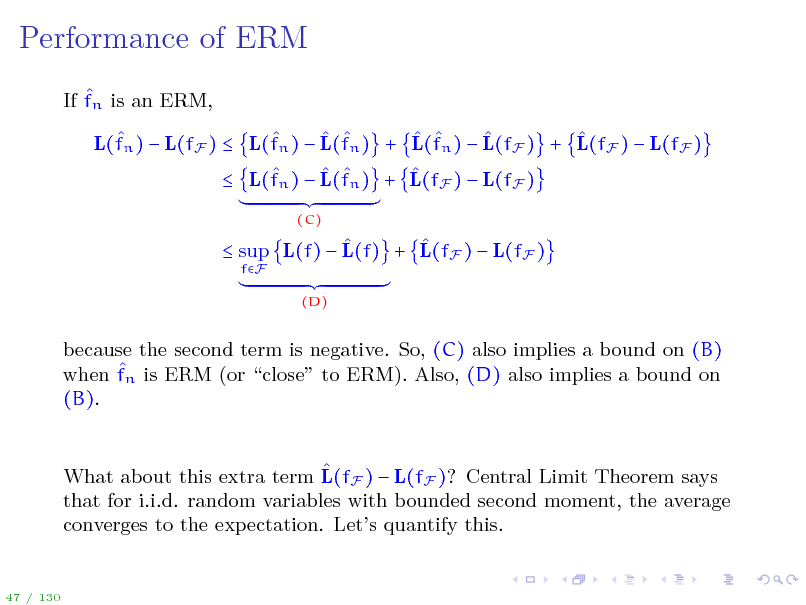
Performance of ERM
If fn is an ERM, L(fn ) L(fF ) L(fn ) L(fn ) + L(fn ) L(fF ) + L(fF ) L(fF ) L(fn ) L(fn ) + L(fF ) L(fF )
(C)
sup L(f) L(f) + L(fF ) L(fF )
fF (D)
because the second term is negative. So, (C) also implies a bound on (B) when fn is ERM (or close to ERM). Also, (D) also implies a bound on (B). What about this extra term L(fF ) L(fF )? Central Limit Theorem says that for i.i.d. random variables with bounded second moment, the average converges to the expectation. Lets quantify this.
47 / 130
51
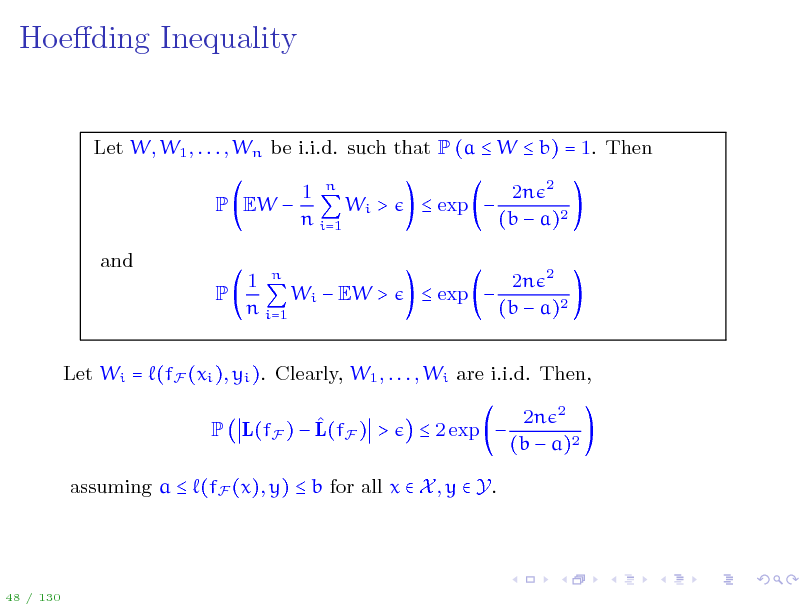
Hoeding Inequality
Let W, W1 , . . . , Wn be i.i.d. such that P (a W b) = 1. Then P EW and P 1 n Wi > n i=1 exp 2n 2 (b a)2 2n 2 (b a)2
1 n Wi EW > n i=1
exp
Let Wi = (fF (xi ), yi ). Clearly, W1 , . . . , Wi are i.i.d. Then, P L(fF ) L(fF ) > 2 exp 2n 2 (b a)2
assuming a (fF (x), y) b for all x X , y Y.
48 / 130
52
Wait, Are We Done?
Cant we conclude directly that (C) is small? That is, P E (fn (x), y) 1 n (fn (xi ), yi ) > n i=1 2 exp 2n 2 (b a)2 ?
49 / 130
53
Wait, Are We Done?
Cant we conclude directly that (C) is small? That is, P E (fn (x), y) 1 n (fn (xi ), yi ) > n i=1 2 exp 2n 2 (b a)2 ?
No! The random variables (fn (xi ), yi ) are not necessarily independent and it is possible that E (fn (x), y) = EW E (fn (xi ), yi ) = EWi The expected loss is out of sample performance while the second term is in sample. We say that (fn (xi ), yi ) is a biased estimate of E (fn (x), y). How bad can this bias be?
49 / 130
54
![Slide: Example
X = [0, 1], Y = {0, 1} (f(Xi ), Yi ) = I{f(Xi )Yi } distribution P = Px Py x with Px = Unif[0, 1] and Py x = y=1 function class F = nN f = fS S X , S = n, fS (x) = I{xS}
1 0 1
ERM fn memorizes (perfectly ts) the data, but has no ability to generalize. Observe that 0 = E (fn (xi ), yi ) E (fn (x), y) = 1 This phenomenon is called overtting.
50 / 130](https://yosinski.com/mlss12/media/slides/MLSS-2012-Rakhlin-Statistical-Learning-Theory_055.png)
Example
X = [0, 1], Y = {0, 1} (f(Xi ), Yi ) = I{f(Xi )Yi } distribution P = Px Py x with Px = Unif[0, 1] and Py x = y=1 function class F = nN f = fS S X , S = n, fS (x) = I{xS}
1 0 1
ERM fn memorizes (perfectly ts) the data, but has no ability to generalize. Observe that 0 = E (fn (xi ), yi ) E (fn (x), y) = 1 This phenomenon is called overtting.
50 / 130
55
Example
Not only is (C) large in this example. Also, uniform deviations (D) do not converge to zero. For any n N and any (x1 , y1 ), . . . , (xn , yn ) P sup Ex,y (f(x), y)
fF
1 n (f(xi ), yi ) = 1 n i=1
Where do we go from here? Two approaches: 1. understand how to upper bound uniform deviations (D) 2. nd properties of algorithms that limit in some way the bias of (fn (xi ), yi ). Stability and compression are two such approaches.
51 / 130
56
Uniform Deviations
We rst focus on understanding sup Ex,y (f(x), y)
fF
1 n (f(xi ), yi ) n i=1
If F = {f0 } consists of a single function, then clearly sup E (f(x), y)
fF
1 n 1 n (f(xi ), yi ) = E (f0 (x), y) (f0 (xi ), yi ) n i=1 n i=1 n) by Hoedings inequality, assuming
This quantity is OP (1 a (f0 (x), y) b.
Moral: for simple classes F the uniform deviations (D) can be bounded while for rich classes not. We will see how far we can push the size of F.
52 / 130
57
A bit of notation to simplify things...
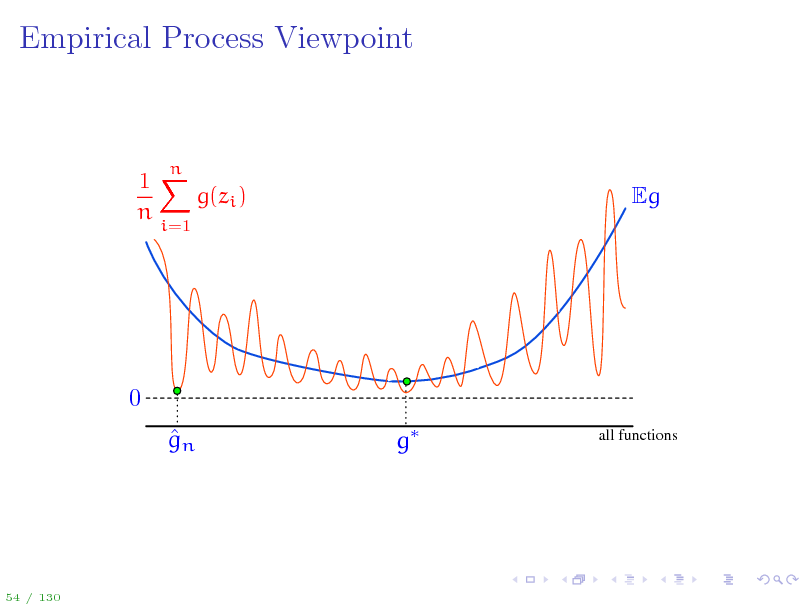
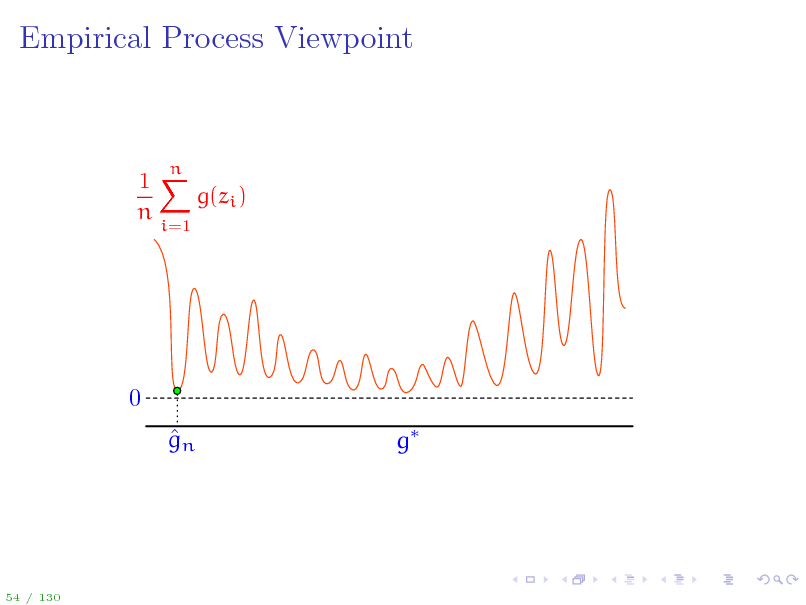
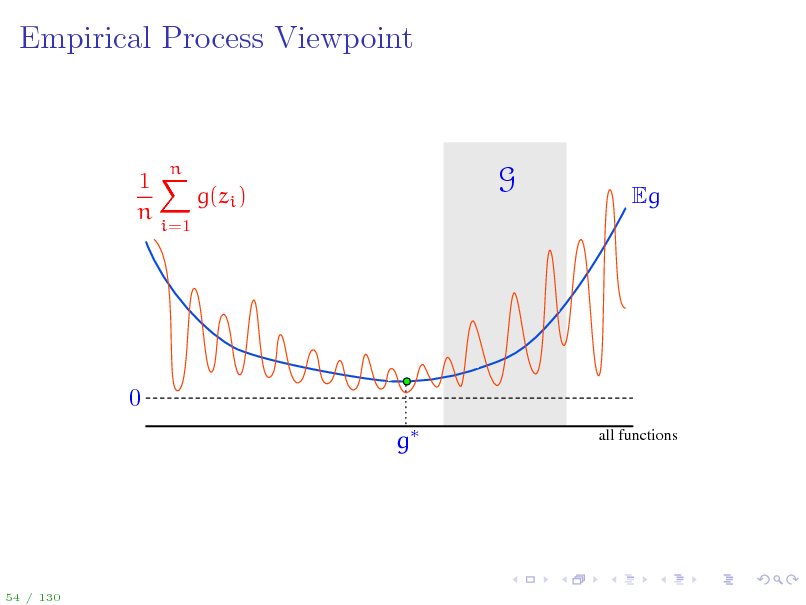
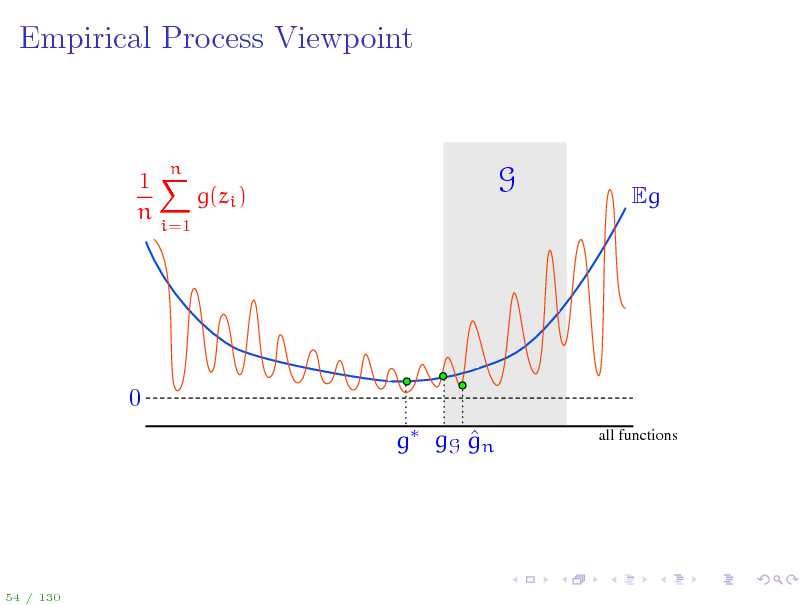
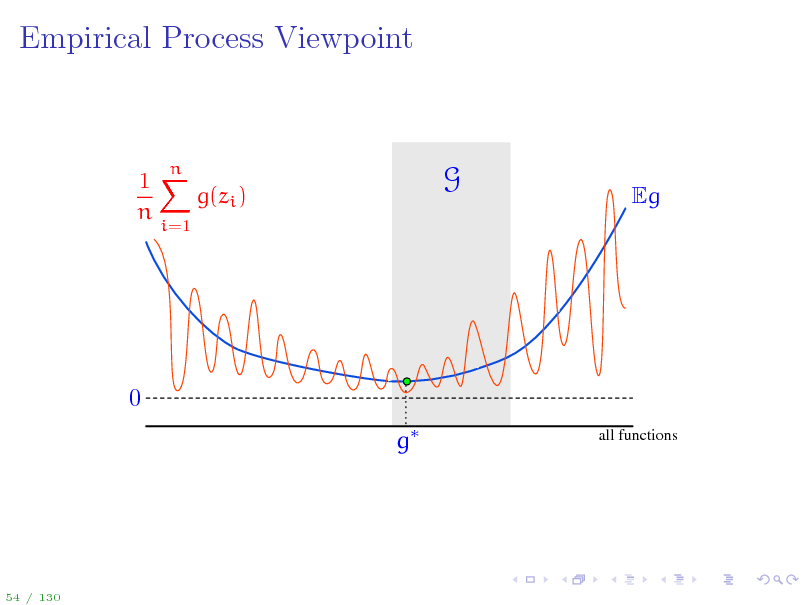
To ease the notation, Let zi = (xi , yi ) so that the training data is {z1 , . . . , zn } g(z) = (f(x), y) for z = (x, y) Loss class G = g g(z) = (f(x), y) = F gn = (fn (), ), gG = (fF (), ) g = arg ming Eg(z) = (f (), ) is Bayes optimal (loss) function We can now work with the set G, but keep in mind that each g G corresponds to an f F: g G f F Once again, the quantity of interest is sup Eg(z)
gG
1 n g(zi ) n i=1
1 On the next slide, we visualize deviations Eg(z) n n g(zi ) for all i=1 possible functions g and discuss all the concepts introduces so far.
53 / 130
58
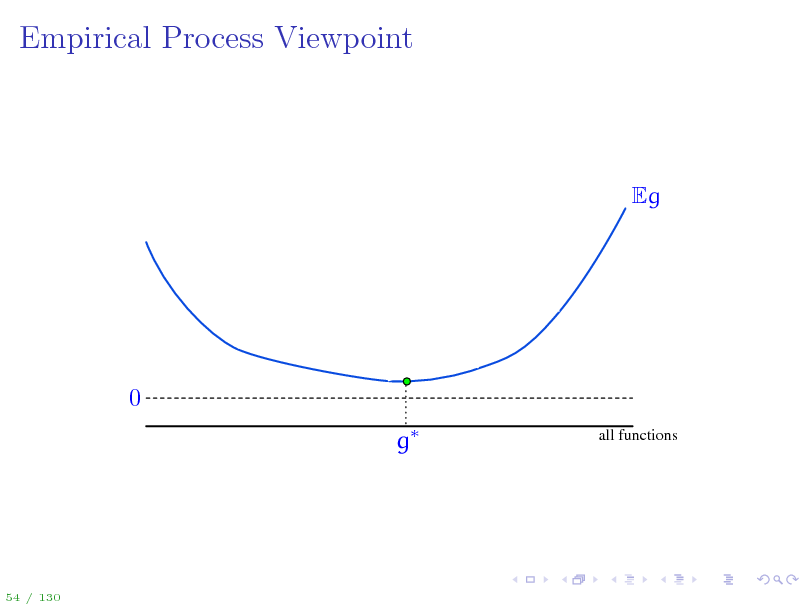
Empirical Process Viewpoint
Eg
0 g
all functions
54 / 130
59
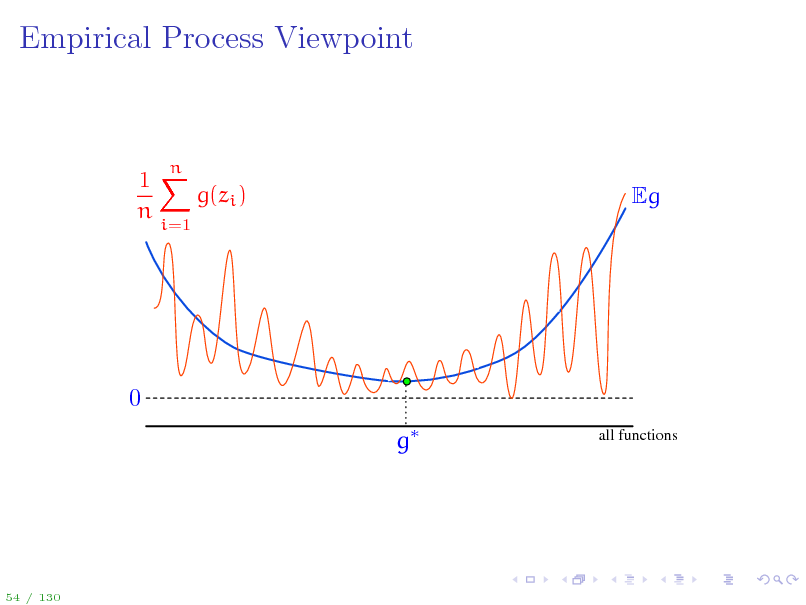
Empirical Process Viewpoint
1X g(zi ) n
i=1
n
Eg
0 g
all functions
54 / 130
60
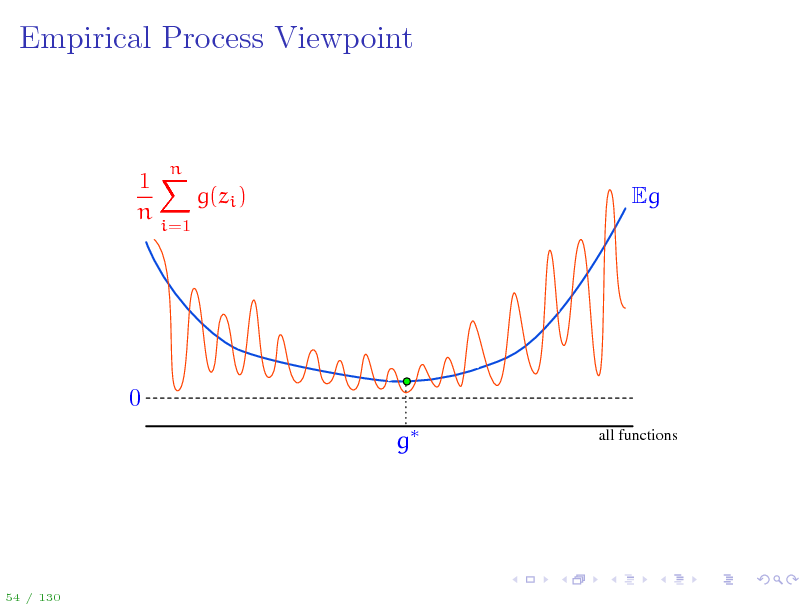
Empirical Process Viewpoint
1X g(zi ) n
i=1
n
Eg
0 g
all functions
54 / 130
61
Empirical Process Viewpoint
1X g(zi ) n
i=1
n
Eg
0 gn g
all functions
54 / 130
62
Empirical Process Viewpoint
1X g(zi ) n
i=1
n
0 gn g
54 / 130
63
Empirical Process Viewpoint
1X g(zi ) n
i=1
n
G
Eg
0 g
all functions
54 / 130
64
Empirical Process Viewpoint
1X g(zi ) n
i=1
n
G
Eg
0 g gG gn
all functions
54 / 130
65
Empirical Process Viewpoint
1X g(zi ) n
i=1
n
G
Eg
0 g
all functions
54 / 130
66
Empirical Process Viewpoint
A stochastic process is a collection of random variables indexed by some set. An empirical process is a stochastic process Eg(z) indexed by a function class G. Uniform Law of Large Numbers: sup Eg
gG
1 n g(zi ) n i=1
gG
1 n g(zi ) 0 n i=1
in probability.
55 / 130
67
Empirical Process Viewpoint
A stochastic process is a collection of random variables indexed by some set. An empirical process is a stochastic process Eg(z) indexed by a function class G. Uniform Law of Large Numbers: sup Eg
gG
1 n g(zi ) n i=1
gG
1 n g(zi ) 0 n i=1
in probability.
Key question: How big can G be for the supremum of the empirical process to still be manageable?
55 / 130
68
Union Bound (Booles inequality)
Booles inequality: for a nite or countable set of events, P (j Aj )
j
P (Aj )
Let G = {g1 , . . . , gN }. Then P g G Eg 1 n g(zi ) > n i=1
N j=1
P Egj
1 n gj (zi ) > n i=1
Assuming P (a g(zi ) b) = 1 for every g G, P sup Eg
gG
1 n g(zi ) > n i=1
N exp
2n 2 (b a)2
56 / 130
69
Finite Class
2n Alternatively, we set = N exp (ba)2
2
and write log(N) + log(1 ) 2n
P sup Eg
gG
1 n g(zi ) > (b a) n i=1
Another way to write it: with probability at least 1 , sup Eg
gG
1 n g(zi ) (b a) n i=1
log(N) + log(1 ) 2n
Hence, with probability at least 1 , the ERM algorithm fn for a class F of cardinality N satises L(fn ) inf L(f) 2(b a)
fF
log(N) + log(1 ) 2n
assuming a (f(x), y) b for all f F, x X , y Y.
The constant 2 is due to the L(fF ) F ) term. This is a loose upper bound. L(f
57 / 130
70
Once again...
A take-away message is that the following two statements are worlds apart:
with probability at least 1 , for any g G,
Eg
1 n g(zi ) n i=1
vs 1 n g(zi ) n i=1
for any g G, with probability at least 1 ,
Eg
The second statement follows from CLT, while the rst statement is often dicult to obtain and only holds for some G.
58 / 130
71
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
59 / 130
72
Countable Class: Weighted Union Bound
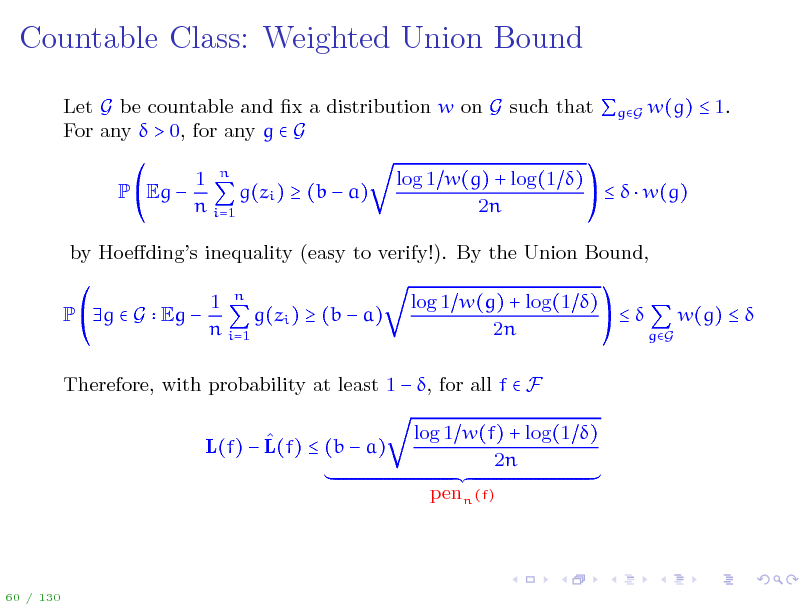
Let G be countable and x a distribution w on G such that gG w(g) 1. For any > 0, for any g G P Eg 1 n g(zi ) (b a) n i=1 log 1 w(g) + log(1 ) w(g) 2n
by Hoedings inequality (easy to verify!). By the Union Bound, P g G Eg 1 n g(zi ) (b a) n i=1 log 1 w(g) + log(1 ) w(g) 2n gG
Therefore, with probability at least 1 , for all f F L(f) L(f) (b a) log 1 w(f) + log(1 ) 2n penn (f)
60 / 130
73
Countable Class: Weighted Union Bound
If fn is a regularized ERM, L(fn ) L(fF ) L(fn ) L(fn ) penn (fn ) + L(fn ) + penn (fn ) L(fF ) penn (fF ) + L(fF ) L(fF ) + penn (fF ) sup L(f) L(f) penn (f) + L(fF ) L(fF ) + penn (fF )
fF
So, (E) implies a bound on (B) when fn is regularized ERM. From the weighted union bound for a countable class: L(fn ) L(fF ) L(fF ) L(fF ) + penn (fF ) 2(b a) log 1 w(fF ) + log(1 ) 2n
61 / 130
74
![Slide: Uncountable Class: Compression Bounds
Let us make the dependence of the algorithm fn on the training set n = fn [S]. S = {(x1 , y1 ), . . . , (xn , yn )} explicit: f Suppose F has the property that there exists a compression function Ck which selects from any dataset S of any size n a subset of k labeled examples Ck (S) S such that the algorithm can be written as fn [S] = fk [Ck (S)] Then, 1 n (fk [Ck (S)](xi ), yi ) L(fn ) L(fn ) = E (fk [Ck (S)](x), y) n i=1
I{1,...,n}, I k
max
1 n E (fk [SI ](x), y) (fk [SI ](xi ), yi ) n i=1
62 / 130](https://yosinski.com/mlss12/media/slides/MLSS-2012-Rakhlin-Statistical-Learning-Theory_075.png)
Uncountable Class: Compression Bounds
Let us make the dependence of the algorithm fn on the training set n = fn [S]. S = {(x1 , y1 ), . . . , (xn , yn )} explicit: f Suppose F has the property that there exists a compression function Ck which selects from any dataset S of any size n a subset of k labeled examples Ck (S) S such that the algorithm can be written as fn [S] = fk [Ck (S)] Then, 1 n (fk [Ck (S)](xi ), yi ) L(fn ) L(fn ) = E (fk [Ck (S)](x), y) n i=1
I{1,...,n}, I k
max
1 n E (fk [SI ](x), y) (fk [SI ](xi ), yi ) n i=1
62 / 130
75
![Slide: Uncountable Class: Compression Bounds
Since fk [SI ] only depends on k out of n points, the empirical average is mostly out of sample. Adding and subtracting 1 (fk [SI ](x ), y ) n (x ,y )W
for an additional set of i.i.d. random variables W = {(x1 , y1 ), . . . , (xk , yk )} results in an upper bound
I{1,...,n}, I k
max
1 E (fk [SI ](x), y) n (x,y)S
SI W I
(fk [SI ](x), y) +
(b a)k n
We appeal to the union bound over the n possibilities, with a Hoedings k bound for each. Then with probability at least 1 , L(fn ) inf L(f) 2(b a)
fF
k log(en k) + log(1 ) (b a)k + 2n n
assuming a (f(x), y) b for all f F, x X , y Y.
63 / 130](https://yosinski.com/mlss12/media/slides/MLSS-2012-Rakhlin-Statistical-Learning-Theory_076.png)
Uncountable Class: Compression Bounds
Since fk [SI ] only depends on k out of n points, the empirical average is mostly out of sample. Adding and subtracting 1 (fk [SI ](x ), y ) n (x ,y )W
for an additional set of i.i.d. random variables W = {(x1 , y1 ), . . . , (xk , yk )} results in an upper bound
I{1,...,n}, I k
max
1 E (fk [SI ](x), y) n (x,y)S
SI W I
(fk [SI ](x), y) +
(b a)k n
We appeal to the union bound over the n possibilities, with a Hoedings k bound for each. Then with probability at least 1 , L(fn ) inf L(f) 2(b a)
fF
k log(en k) + log(1 ) (b a)k + 2n n
assuming a (f(x), y) b for all f F, x X , y Y.
63 / 130
76
![Slide: Example: Classication with Thresholds in 1D
X = [0, 1], Y = {0, 1} F = f f (x) = I{x} , [0, 1] (f (x), y) = I{f (x)y}
fn 0 1
For any set of data (x1 , y1 ), . . . , (xn , yn ), the ERM solution fn has the property that the rst occurrence xl on the left of the threshold has label yl = 0, while rst occurrence xr on the right label yr = 1. Enough to take k = 2 and dene fn [S] = f2 [(xl , 0), (xr , 1)].
64 / 130](https://yosinski.com/mlss12/media/slides/MLSS-2012-Rakhlin-Statistical-Learning-Theory_077.png)
Example: Classication with Thresholds in 1D
X = [0, 1], Y = {0, 1} F = f f (x) = I{x} , [0, 1] (f (x), y) = I{f (x)y}
fn 0 1
For any set of data (x1 , y1 ), . . . , (xn , yn ), the ERM solution fn has the property that the rst occurrence xl on the left of the threshold has label yl = 0, while rst occurrence xr on the right label yr = 1. Enough to take k = 2 and dene fn [S] = f2 [(xl , 0), (xr , 1)].
64 / 130
77
Stability
Yet another way to limit the bias of (fn (xi ), yi ) as an estimate of L(fn ) is through a notion of stability. An algorithm fn is stable if a change (or removal) of a single data point does not change (in a certain mathematical sense) the function fn by much. Of course, a dumb algorithm which outputs fn = f0 without even looking at n (xi ), yi ) are independent random variables... data is very stable and (f But it is not a good algorithm! We would like to have an algorithm that both approximately minimizes the empirical error and is stable. Turns out, certain types of regularization methods are stable. Example: 1 n fn = arg min (f(xi ) yi )2 + f fF n i=1
2 K
where is the norm induced by the kernel of a reproducing kernel Hilbert space (RKHS) F.
65 / 130
78
Summary so far
We proved upper bounds on L(fn ) L(fF ) for ERM over a nite class Regularized ERM over a countable class (weighted union bound) ERM over classes F with the compression property ERM or Regularized ERM that are stable (only sketched it) What about a more general situation? Is there a way to measure complexity of F that tells us whether ERM will succeed?
66 / 130
79
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
67 / 130
80
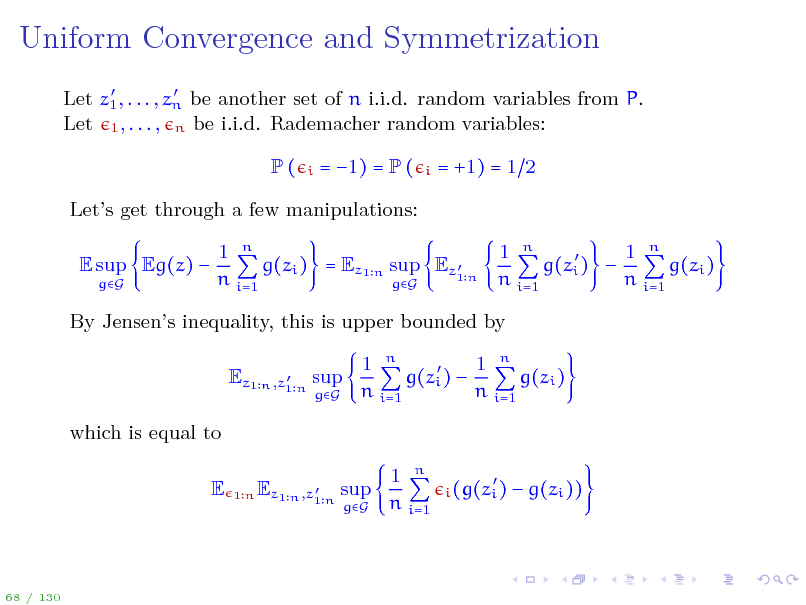
Uniform Convergence and Symmetrization
Let z1 , . . . , zn be another set of n i.i.d. random variables from P. Let 1 , . . . , n be i.i.d. Rademacher random variables:
P(
i
= 1) = P (
i
= +1) = 1 2
Lets get through a few manipulations: E sup Eg(z)
gG
1 n 1 n 1 n g(zi ) = Ez1 n sup Ez1 n g(zi ) g(zi ) n i=1 n i=1 n i=1 gG
By Jensens inequality, this is upper bounded by
Ez1 n ,z1 n sup
gG
1 n 1 n g(zi ) g(zi ) n i=1 n i=1
which is equal to E
1n Ez1 n ,z1 n sup
gG
1 n n i=1
i (g(zi )
g(zi ))
68 / 130
81
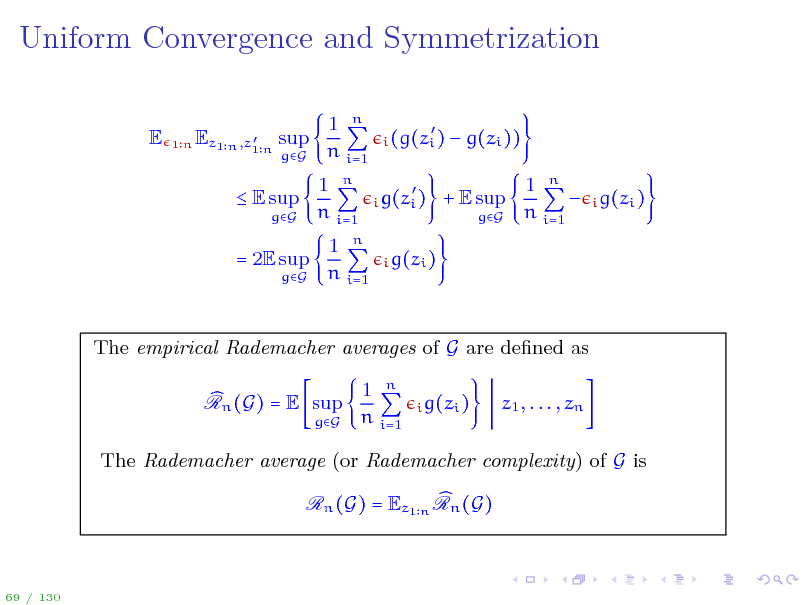
Uniform Convergence and Symmetrization
E
Ez1 n ,z1 n sup
1n
gG
1 n n i=1 1 n n i=1 1 n i=1
n
i (g(zi ) i g(zi ) i g(zi )
g(zi )) 1 n i g(zi ) n i=1
E sup
gG
+ E sup
gG
= 2E sup
gG
The empirical Rademacher averages of G are dened as Rn (G) = E sup
gG
1 n n i=1
i g(zi )
z1 , . . . , zn
The Rademacher average (or Rademacher complexity) of G is Rn (G) = Ez1 n Rn (G)
69 / 130
82
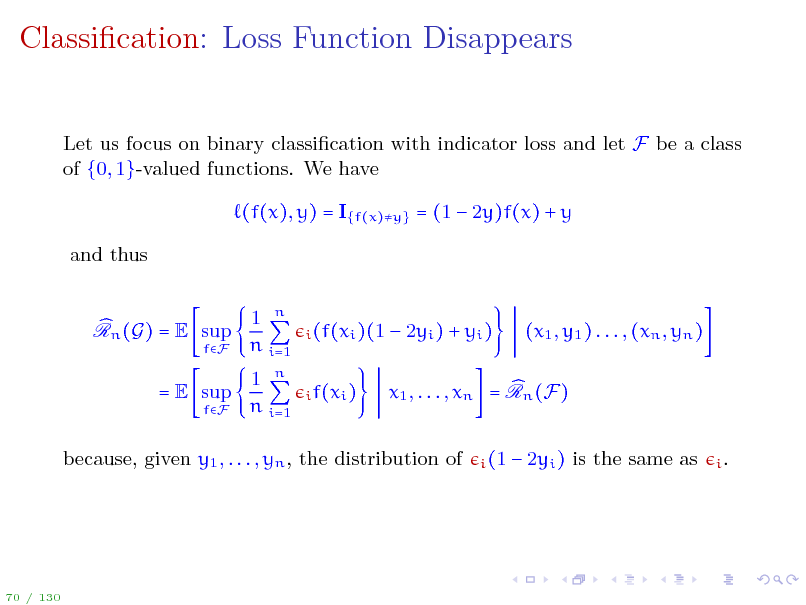
Classication: Loss Function Disappears
Let us focus on binary classication with indicator loss and let F be a class of {0, 1}-valued functions. We have (f(x), y) = I{f(x)y} = (1 2y)f(x) + y and thus 1 n n i=1 1 n n i=1
Rn (G) = E sup
fF
i (f(xi )(1 i f(xi )
2yi ) + yi )
(x1 , y1 ) . . . , (xn , yn )
= E sup
fF
x1 , . . . , xn = Rn (F)
i (1
because, given y1 , . . . , yn , the distribution of
2yi ) is the same as
i.
70 / 130
83
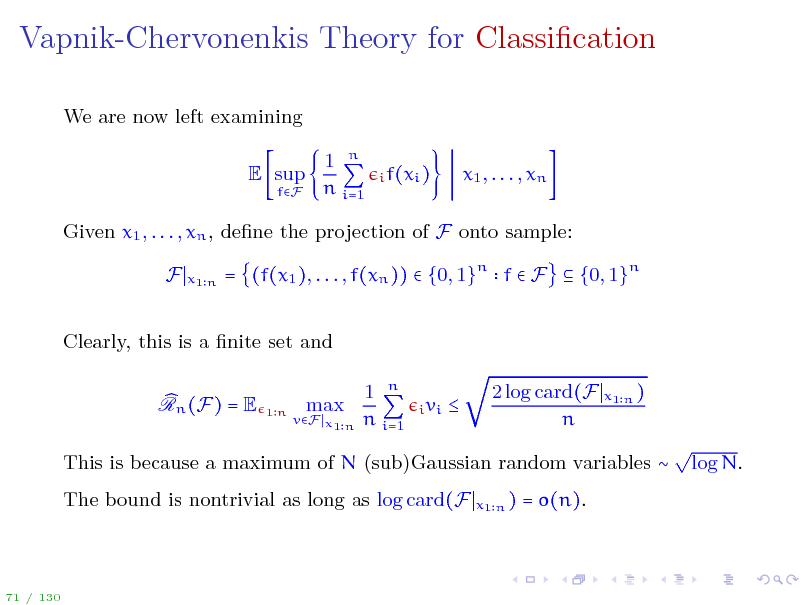
Vapnik-Chervonenkis Theory for Classication
We are now left examining E sup
fF
1 n n i=1
i f(xi )
x1 , . . . , xn
Given x1 , . . . , xn , dene the projection of F onto sample: F
x1 n
= (f(x1 ), . . . , f(xn )) {0, 1}n f F {0, 1}n
Clearly, this is a nite set and Rn (F) = E max 1 n n i=1
i vi
1n
vF x1 n
2 log card(F n
x1 n )
This is because a maximum of N (sub)Gaussian random variables The bound is nontrivial as long as log card(F
x1 n )
log N.
= o(n).
71 / 130
84
Vapnik-Chervonenkis Theory for Classication
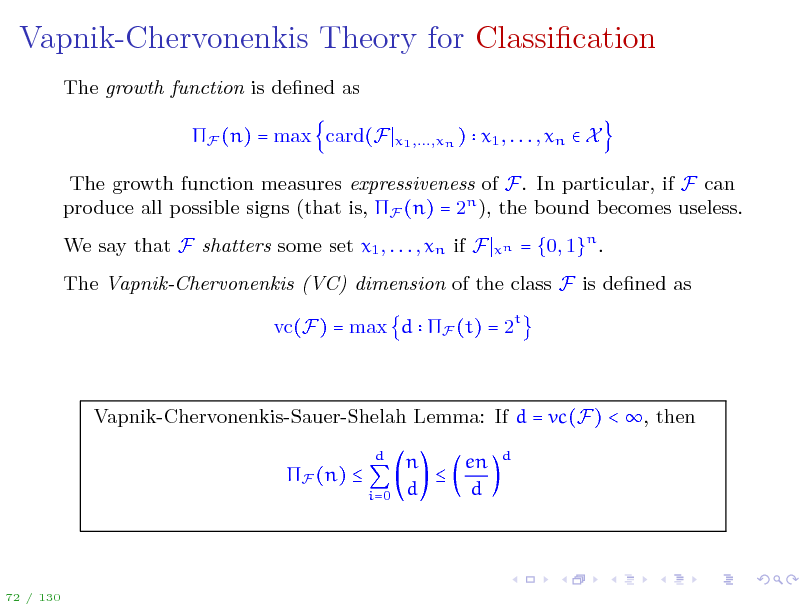
The growth function is dened as F (n) = max card(F
x1 ,...,xn )
x1 , . . . , xn X
The growth function measures expressiveness of F. In particular, if F can produce all possible signs (that is, F (n) = 2n ), the bound becomes useless. We say that F shatters some set x1 , . . . , xn if F
xn
= {0, 1}n .
The Vapnik-Chervonenkis (VC) dimension of the class F is dened as vc(F) = max d F (t) = 2t
Vapnik-Chervonenkis-Sauer-Shelah Lemma: If d = vc(F) < , then F (n)
d i=0
n en d d
d
72 / 130
85
Vapnik-Chervonenkis Theory for Classication
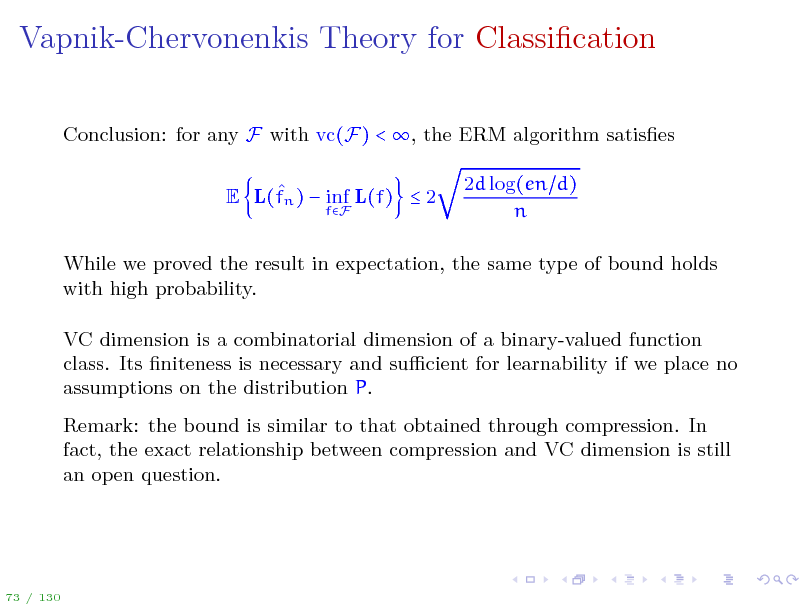
Conclusion: for any F with vc(F) < , the ERM algorithm satises E L(fn ) inf L(f) 2
fF
2d log(en d) n
While we proved the result in expectation, the same type of bound holds with high probability. VC dimension is a combinatorial dimension of a binary-valued function class. Its niteness is necessary and sucient for learnability if we place no assumptions on the distribution P. Remark: the bound is similar to that obtained through compression. In fact, the exact relationship between compression and VC dimension is still an open question.
73 / 130
86
Vapnik-Chervonenkis Theory for Classication
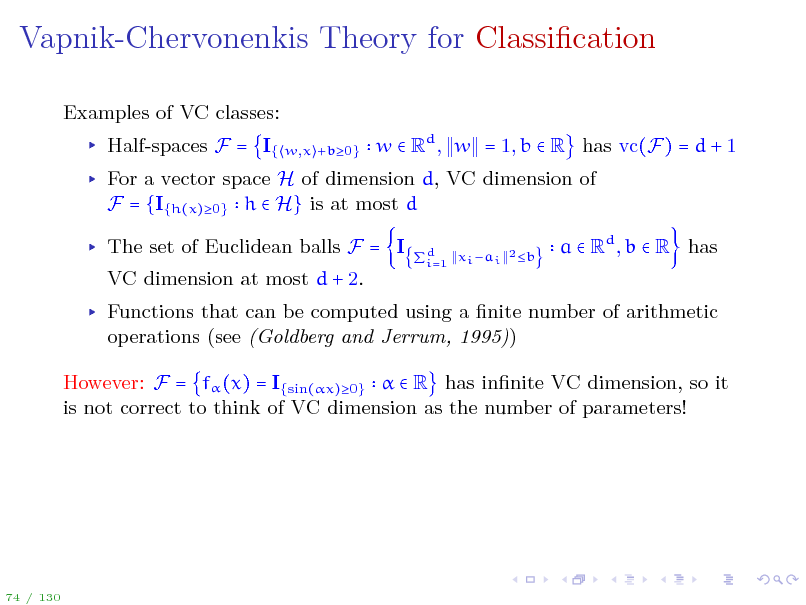
Examples of VC classes: Half-spaces F = I{
w,x +b0}
w Rd , w = 1, b R has vc(F) = d + 1
For a vector space H of dimension d, VC dimension of F = {I{h(x)0} h H} is at most d The set of Euclidean balls F = I VC dimension at most d + 2.
xi ai 2 b d i=1
a Rd , b R has
Functions that can be computed using a nite number of arithmetic operations (see (Goldberg and Jerrum, 1995)) However: F = f (x) = I{sin(x)0} R has innite VC dimension, so it is not correct to think of VC dimension as the number of parameters!
74 / 130
87
Vapnik-Chervonenkis Theory for Classication
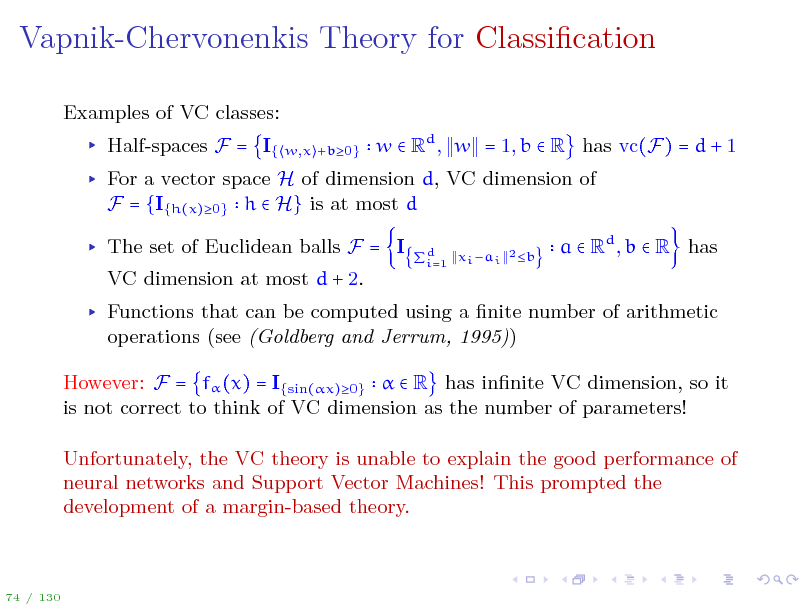
Examples of VC classes: Half-spaces F = I{
w,x +b0}
w Rd , w = 1, b R has vc(F) = d + 1
For a vector space H of dimension d, VC dimension of F = {I{h(x)0} h H} is at most d The set of Euclidean balls F = I VC dimension at most d + 2.
xi ai 2 b d i=1
a Rd , b R has
Functions that can be computed using a nite number of arithmetic operations (see (Goldberg and Jerrum, 1995)) However: F = f (x) = I{sin(x)0} R has innite VC dimension, so it is not correct to think of VC dimension as the number of parameters! Unfortunately, the VC theory is unable to explain the good performance of neural networks and Support Vector Machines! This prompted the development of a margin-based theory.
74 / 130
88
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
75 / 130
89
Classication with Real-Valued Functions
Many methods use I(F) = {I{f0} f F} for classication. The VC dimension can be very large, yet in practice the methods work well. Example: f(x) = fw (x) = w, (x) where is a mapping to a highdimensional feature space (see Kernel Methods). The VC dimension of the set is typically huge (equal to the dimensionality of (x)) or innite, yet the methods perform well! Is there an explanation beyond VC theory?
76 / 130
90
Margins
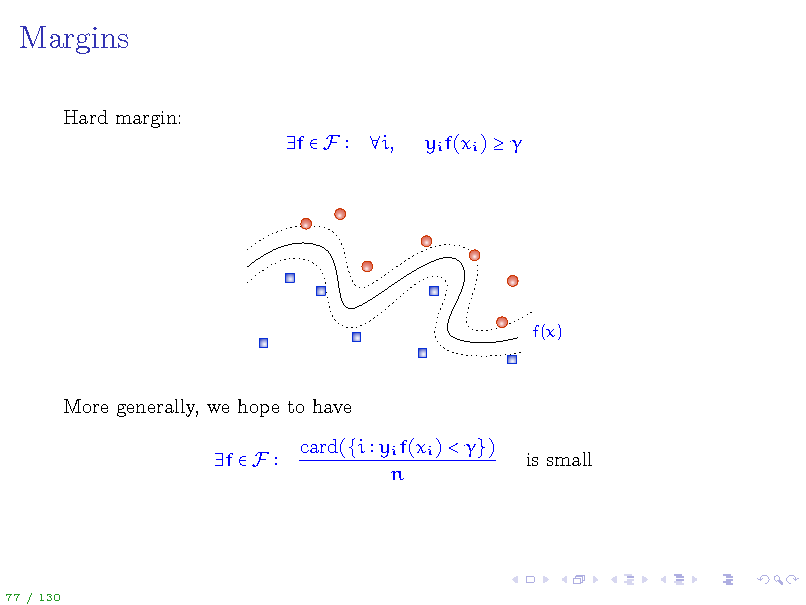
Hard margin: f F i, yi f(xi )
f(x)
More generally, we hope to have f F card({i yi f(xi ) < }) n is small
77 / 130
91
Surrogate Loss
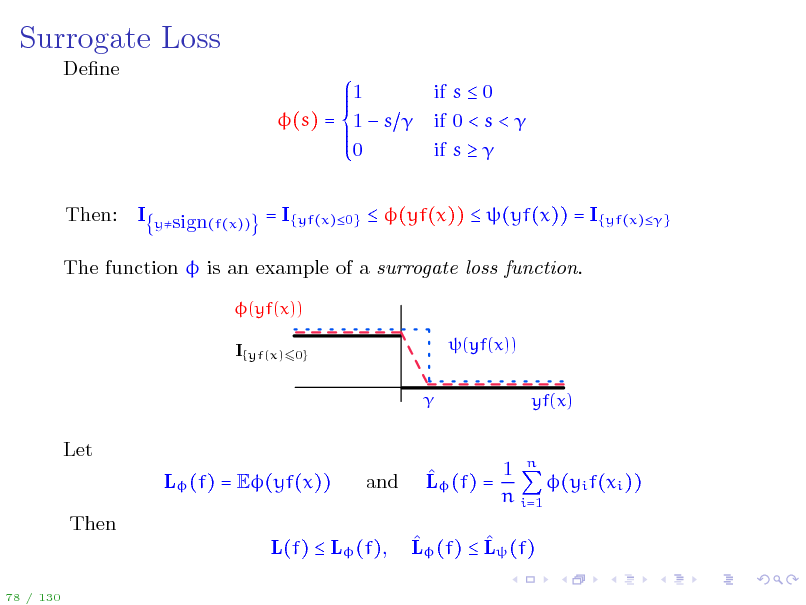
Dene 1 (s) = 1 s 0 Then: I if s 0 if 0 < s < if s
ysign(f(x))
= I{yf(x)0} (yf(x)) (yf(x)) = I{yf(x)}
The function is an example of a surrogate loss function.
(yf(x)) I{yf(x)60} (yf(x)) yf(x)
Let L (f) = E(yf(x)) Then L(f) L (f),
78 / 130
and
1 n L (f) = (yi f(xi )) n i=1 L (f) L (f)
92
Surrogate Loss
Now consider uniform deviations for the surrogate loss: E sup L (f) L (f)
fF
We had shown that this quantity is at most 2Rn ((F)) for (F) = g(z) = (yf(x)) f F
A useful property of Rademacher averages: Rn ((F)) LRn (F) if is L-Lipschitz.
Observe that in our example is 1 -Lipschitz. Hence, 2 E sup L (f) L (f) Rn (F) fF
79 / 130
93
Margin Bound
Same result in high probability: with probability at least 1 , 2 sup L (f) L (f) Rn (F) + fF With probability at least 1 , for all f F 2 L(f) L (f) + Rn (F) + If fn is minimizing margin loss 1 n fn = arg min (yi f(xi )) fF n i=1 then with probability at least 1 L(fn ) inf L (f) +
fF
log(1 ) 2n
log(1 ) 2n
4 Rn (F) + 2
log(1 ) 2n
Note: assumes knowledge of , but this assumption can be removed.
80 / 130
94
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
81 / 130
95
Useful Properties
1. If F G, then Rn (F) Rn (G) 2. Rn (F) = Rn (conv(F)) 3. For any c R, Rn (cF) = c Rn (F) 4. If R R is L-Lipschitz (that is, (a) (b) L a b for all a, b R), then Rn ( F) LRn (F)
82 / 130
96
Rademacher Complexity of Kernel Classes
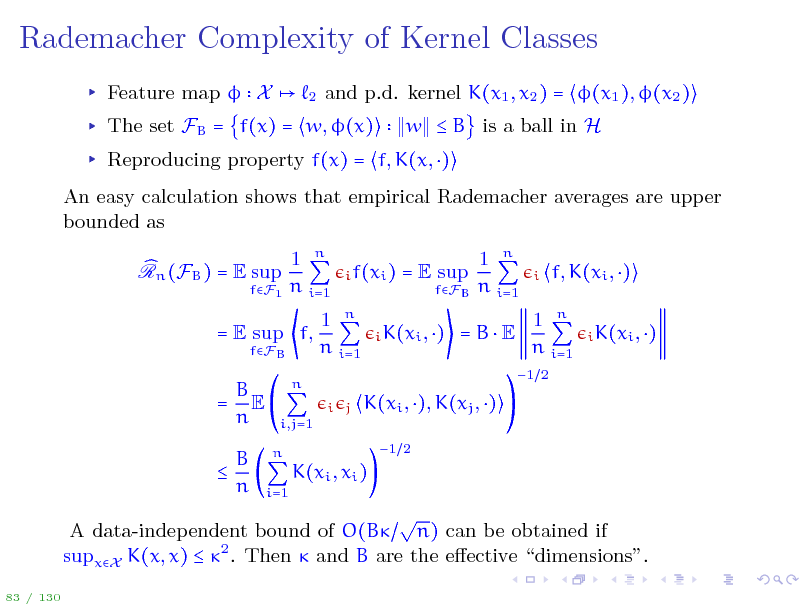
Feature map X
2
and p.d. kernel K(x1 , x2 ) = (x1 ), (x2 ) w B is a ball in H
The set FB = f(x) = w, (x)
Reproducing property f(x) = f, K(x, ) An easy calculation shows that empirical Rademacher averages are upper bounded as Rn (FB ) = E sup 1 n n i=1
i f(xi )
fF1
= E sup
fFB
1 n n i=1
i
f, K(xi , )
i K(xi , )
= E sup f,
fFB
1 n n i=1
i j
i K(xi , )
=BE
1 n n i=1
1 2
B = E n B n
n i,j=1 n i=1
K(xi , ), K(xj , )
1 2
K(xi , xi )
A data-independent bound of O(B n) can be obtained if supxX K(x, x) 2 . Then and B are the eective dimensions.
83 / 130
97
Other Examples
Using properties of Rademacher averages, we may establish guarantees for learning with neural networks, decision trees, and so on. Powerful technique, typically requires only a few lines of algebra. Occasionally, covering numbers and scale-sensitive dimensions can be easier to deal with.
84 / 130
98
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
85 / 130
99
![Slide: Real-Valued Functions: Covering Numbers
Consider a class F of [1, 1]-valued functions let Y = [1, 1], (f(x), y) = f(x) y We have E sup L(f) L(f) 2Ex1 n Rn (F)
fF
For real-valued functions the cardinality of F similar functions f and f with
x1 n
is innite. However,
(f(x1 ), . . . , f(xn )) (f (x1 ), . . . , f (xn )) should be treated as the same.
86 / 130](https://yosinski.com/mlss12/media/slides/MLSS-2012-Rakhlin-Statistical-Learning-Theory_100.png)
Real-Valued Functions: Covering Numbers
Consider a class F of [1, 1]-valued functions let Y = [1, 1], (f(x), y) = f(x) y We have E sup L(f) L(f) 2Ex1 n Rn (F)
fF
For real-valued functions the cardinality of F similar functions f and f with
x1 n
is innite. However,
(f(x1 ), . . . , f(xn )) (f (x1 ), . . . , f (xn )) should be treated as the same.
86 / 130
100
![Slide: Real-Valued Functions: Covering Numbers
Given > 0, suppose we can nd V [1, 1]n of nite cardinality such that f, vf V, s.t. Then Rn (F) = E =E
1n
1 n f(xi ) vf i n i=1
sup
fF
1 n n i=1 1 n n i=1 max
vV
i f(xi ) i (f(xi )
1n
sup
fF
vf ) + E i
1n
sup
fF
1 n n i=1
f i vi
+E
1n
1 n n i=1
i vi
Now we are back to the set of nite cardinality: Rn (F) + 2 log card(V) n
87 / 130](https://yosinski.com/mlss12/media/slides/MLSS-2012-Rakhlin-Statistical-Learning-Theory_101.png)
Real-Valued Functions: Covering Numbers
Given > 0, suppose we can nd V [1, 1]n of nite cardinality such that f, vf V, s.t. Then Rn (F) = E =E
1n
1 n f(xi ) vf i n i=1
sup
fF
1 n n i=1 1 n n i=1 max
vV
i f(xi ) i (f(xi )
1n
sup
fF
vf ) + E i
1n
sup
fF
1 n n i=1
f i vi
+E
1n
1 n n i=1
i vi
Now we are back to the set of nite cardinality: Rn (F) + 2 log card(V) n
87 / 130
101
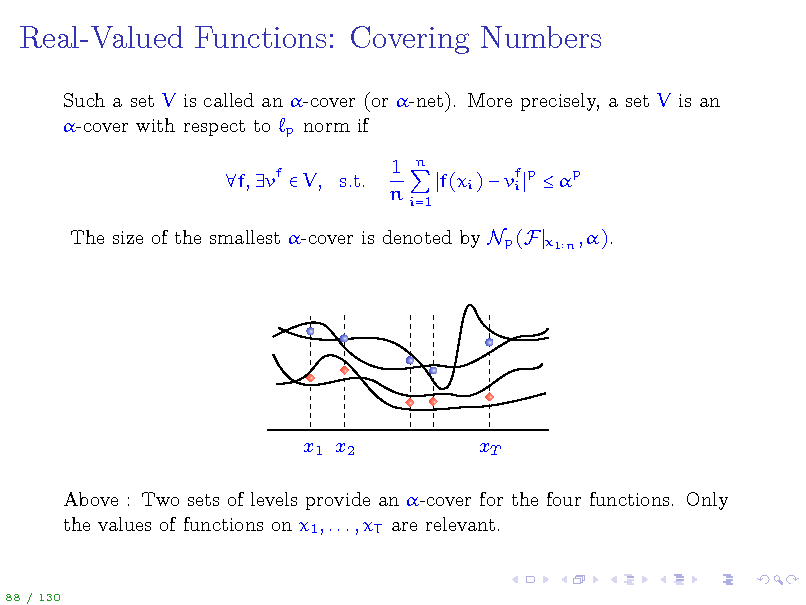
Real-Valued Functions: Covering Numbers
Such a set V is called an -cover (or -net). More precisely, a set V is an -cover with respect to p norm if f, vf V, s.t. 1 n f(xi ) vf p p i n i=1
x1 n , ).
The size of the smallest -cover is denoted by Np (F
x1 x2
xT
Above : Two sets of levels provide an -cover for the four functions. Only the values of functions on x1 , . . . , xT are relevant.
88 / 130
102
Real-Valued Functions: Covering Numbers
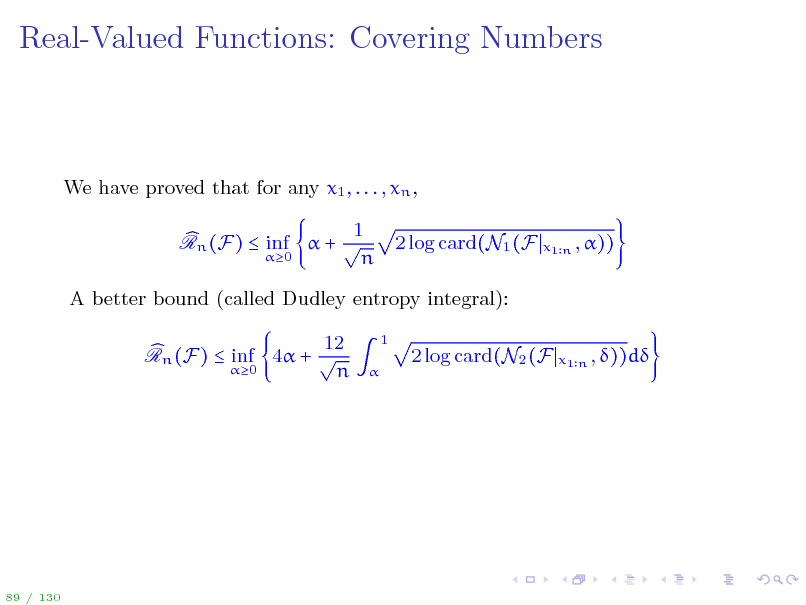
We have proved that for any x1 , . . . , xn , 1 Rn (F) inf + 0 n 2 log card(N1 (F
x1 n , ))
A better bound (called Dudley entropy integral): 12 Rn (F) inf 4 + 0 n
1
2 log card(N2 (F
x1 n , ))d
89 / 130
103
![Slide: Example: Nondecreasing functions.
Consider the set F of nondecreasing functions R While F is a very large set, F N1 (F
x1 n
[1, 1].
is not that large:
x1 n , )
x1 n , )
N2 (F
n2 .
The rst bound on the previous slide yields 1 inf + n 4 log(n) = O(n1 3 )
0
while the second bound (the Dudley entropy integral) 12 inf 4 + 0 n
1
4 log(n)d = O(n1 2 )
where the O notation hides logarithmic factors.
90 / 130](https://yosinski.com/mlss12/media/slides/MLSS-2012-Rakhlin-Statistical-Learning-Theory_104.png)
Example: Nondecreasing functions.
Consider the set F of nondecreasing functions R While F is a very large set, F N1 (F
x1 n
[1, 1].
is not that large:
x1 n , )
x1 n , )
N2 (F
n2 .
The rst bound on the previous slide yields 1 inf + n 4 log(n) = O(n1 3 )
0
while the second bound (the Dudley entropy integral) 12 inf 4 + 0 n
1
4 log(n)d = O(n1 2 )
where the O notation hides logarithmic factors.
90 / 130
104
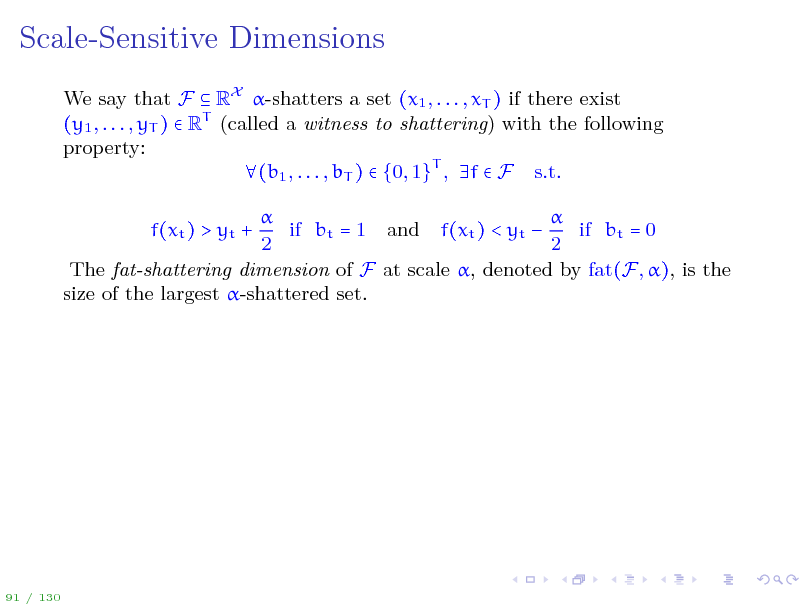
Scale-Sensitive Dimensions
We say that F RX -shatters a set (x1 , . . . , xT ) if there exist (y1 , . . . , yT ) RT (called a witness to shattering) with the following property: (b1 , . . . , bT ) {0, 1}T , f F s.t. if bt = 1 and f(xt ) < yt if bt = 0 2 2 The fat-shattering dimension of F at scale , denoted by fat(F, ), is the size of the largest -shattered set. f(xt ) > yt +
91 / 130
105
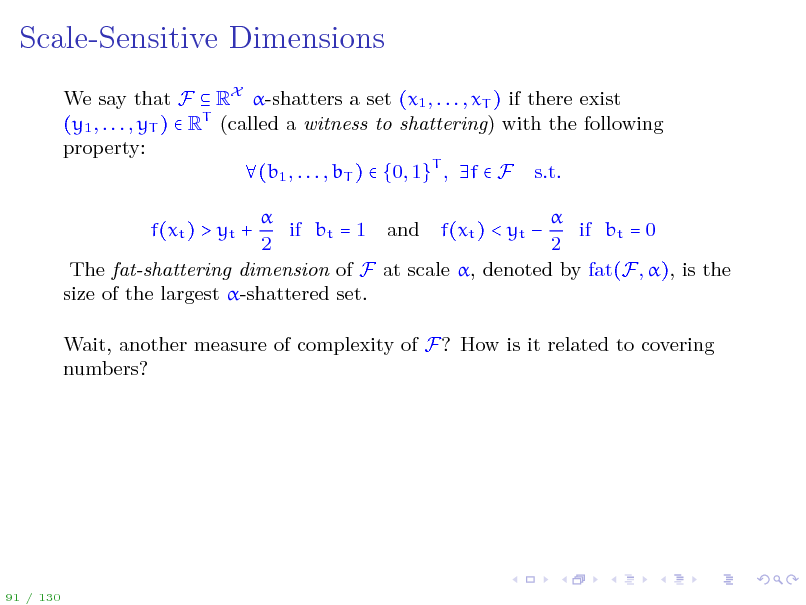
Scale-Sensitive Dimensions
We say that F RX -shatters a set (x1 , . . . , xT ) if there exist (y1 , . . . , yT ) RT (called a witness to shattering) with the following property: (b1 , . . . , bT ) {0, 1}T , f F s.t. if bt = 1 and f(xt ) < yt if bt = 0 2 2 The fat-shattering dimension of F at scale , denoted by fat(F, ), is the size of the largest -shattered set. f(xt ) > yt + Wait, another measure of complexity of F? How is it related to covering numbers?
91 / 130
106
![Slide: Scale-Sensitive Dimensions
We say that F RX -shatters a set (x1 , . . . , xT ) if there exist (y1 , . . . , yT ) RT (called a witness to shattering) with the following property: (b1 , . . . , bT ) {0, 1}T , f F s.t. if bt = 1 and f(xt ) < yt if bt = 0 2 2 The fat-shattering dimension of F at scale , denoted by fat(F, ), is the size of the largest -shattered set. f(xt ) > yt + Wait, another measure of complexity of F? How is it related to covering numbers? Theorem (Mendelson & Vershynin): For F [1, 1]X and any 0 < < 1, N2 (F
x1 n , )
2
Kfat(F ,c)
where K, c are positive absolute constants.
91 / 130](https://yosinski.com/mlss12/media/slides/MLSS-2012-Rakhlin-Statistical-Learning-Theory_107.png)
Scale-Sensitive Dimensions
We say that F RX -shatters a set (x1 , . . . , xT ) if there exist (y1 , . . . , yT ) RT (called a witness to shattering) with the following property: (b1 , . . . , bT ) {0, 1}T , f F s.t. if bt = 1 and f(xt ) < yt if bt = 0 2 2 The fat-shattering dimension of F at scale , denoted by fat(F, ), is the size of the largest -shattered set. f(xt ) > yt + Wait, another measure of complexity of F? How is it related to covering numbers? Theorem (Mendelson & Vershynin): For F [1, 1]X and any 0 < < 1, N2 (F
x1 n , )
2
Kfat(F ,c)
where K, c are positive absolute constants.
91 / 130
107
Quick Summary
We are after uniform deviations in order to understand performance of ERM. Rademacher averages is a nice measure with useful properties. They can be further upper bounded by covering numbers through the Dudley entropy integral. In turn, covering numbers can be controlled via the fat-shattering combinatorial dimension. Whew!
92 / 130
108
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
93 / 130
109
Faster Rates
Are there situations when EL(fn ) inf L(f)
fF
approaches 0 faster than O(1
n)?
Yes! We can beat the Central Limit Theorem! How is this possible?? Recall that the CLT tells us about convergence of average to the expectation for random variables with bounded second moment. What if this variance is small?
94 / 130
110
Faster Rates: Classication
Consider the problem of binary classication with the indicator loss and a class F of {0, 1}-valued functions. For any f F, 1 n (f(xi ), yi ) n i=1 is an average of n Bernoulli random variables with bias p = E (f(x), y). Exact expression for the binomial tails: P L(f) L(f) > Further upper bounds: exp n 2 2p(1 p) + 2 3
2
=
n(p ) i=0
n i p (1 p)ni i
Bernstein Hoeding
exp 2n
95 / 130
111
Faster Rates: Classication
Inverting exp n 2 n 2 exp = 2p(1 p) + 2 3 2p + 2 3
yields that for any f F, with probability at least 1 L(f) L(f) + 2L(f) log(1 ) 2 log(1 ) + n 3n
For non-negative numbers A, B, C AB+C A implies
A B + C2 +
BC
Therefore for any f F, with probability at least 1 , L(f) L(f) + 2L(f) log(1 ) 4 log(1 ) + n n
96 / 130
112
Faster Rates: Classication
By the Union Bound, for F with nite N = card(F), with probability at least 1 , f F L(f) L(f) + 2L(f) log(N ) 4 log(N ) + n n
For an empirical minimizer fn , with probability at least 1 , a zero empirical loss L(fn ) = 0 implies L(fn ) 4 log(N ) n
This happens, for instance, in the so-called noiseless case: L(fF ) = 0. Indeed, then L(fF ) = 0 and thus L(fn ) = 0.
97 / 130
113
Summary: Minimax Viewpoint
Value of a game where we choose an algorithm, Nature chooses a distribution P P, and our payo is the expected loss of our algorithm relative to the best in F: V iid (F, P, n) = inf sup L(fn ) inf L(f)
fn PP fF
If we make no assumption on the distribution P, then P is the set of all distributions. Many of the results we obtained in this lecture are for this distribution-free case. However, one may view margin-based results and the above fast rates for the noiseless case as studying V iid (F, P, n) when P is nicer.
98 / 130
114
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
99 / 130
115
Model Selection
For a given class F, we have proved statements of the type P sup{L(f) L(f)} (, n, F) <
fF
Now, take a countable nested sieve of models F1 F2 ... such that H = function. Fi i=1 is a very large set that will surely capture the Bayes
For a function f H, let k(f) be the smallest index of Fk that contains f. Let us write n (, i) for (, n, Fi ). Let us put a distribution w(i) on the models, with w(i) = 1. Then for i=1 every i, P sup {L(f) L(f)} n (w(i), i) < w(i)
fFi
simply by replacing with w(i).
100 / 130
116
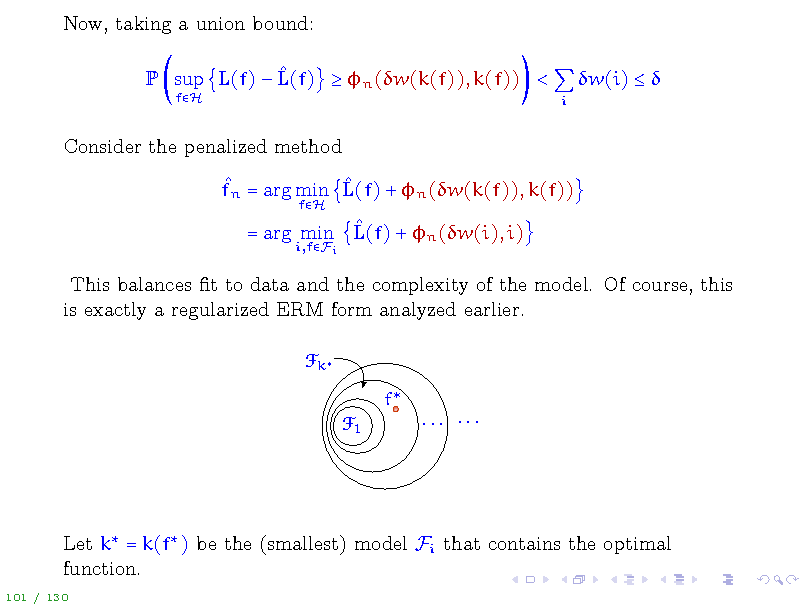
Now, taking a union bound: P sup L(f) L(f) n (w(k(f)), k(f)) <
fH i
w(i)
Consider the penalized method fn = arg min L(f) + n (w(k(f)), k(f))
fH
= arg min L(f) + n (w(i), i)
i,fFi
This balances t to data and the complexity of the model. Of course, this is exactly a regularized ERM form analyzed earlier.
F k f F1 ... ...
Let k = k(f ) be the (smallest) model Fi that contains the optimal function.
101 / 130
117
Exactly as on the slide Countable Class: Weighted Union Bound, L(fn ) L(f ) L(fn ) L(fn ) penn (fn ) + L(fn ) + penn (fn ) L(fF ) penn (fF ) + L(fF ) L(fF ) + penn (fF ) L(f ) L(f ) + penn (f ) = L(f ) L(f ) + n (w(k ), k ) The rst part of this bound is OP (1 n) by the CLT, just as before. If the dependence of on 1 is logarithmic, then taking w(i) = 2i simply implies an additional additive i , a penalty for not knowing the model in advance. Conclusion: given uniform deviation bounds for a single class F, as developed earlier, we can perform model selection by penalizing model complexity!
102 / 130
118
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
103 / 130
119
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
104 / 130
120
Looking back: Statistical Learning
future looks like the past modeled as i.i.d. data evaluated on a random sample from the same distribution developed various measures of complexity of F
105 / 130
121
Example #1: Bit Prediction
Predict a binary sequence y1 , y2 , . . . {0, 1}, which is revealed one by one. At step t, make a prediction zt of the t-th bit, then yt is revealed. Let ct = I{zt =yt } . Goal: make cn =
1 n n t=1 ct large.
Suppose we are told that the sequence presented is Bernoulli with an unknown bias p. How should we choose predictions?
106 / 130
122
Example #1: Bit Prediction
Of course, we should do majority vote over the past outcomes zt = I{ t1 1 y where yt1 =
1 t1 2}
t1 s=1 ys . This algorithm guarantees ct max{p, 1 p} and
lim inf (t max{t , 1 zt }) 0 c z
t
almost surely
()
107 / 130
123
Example #1: Bit Prediction
Of course, we should do majority vote over the past outcomes zt = I{ t1 1 y where yt1 =
1 t1 2}
t1 s=1 ys . This algorithm guarantees ct max{p, 1 p} and
lim inf (t max{t , 1 zt }) 0 c z
t
almost surely
()
Claim: there is an algorithm that ensures () for an arbitrary sequence. Any idea how to do it?
107 / 130
124
Example #1: Bit Prediction
Of course, we should do majority vote over the past outcomes zt = I{ t1 1 y where yt1 =
1 t1 2}
t1 s=1 ys . This algorithm guarantees ct max{p, 1 p} and
lim inf (t max{t , 1 zt }) 0 c z
t
almost surely
()
Claim: there is an algorithm that ensures () for an arbitrary sequence. Any idea how to do it? Another way to formulate (): number of mistakes should be not much more than made by the best of the two experts, one predicting 1 all the time, the other constantly predicting 0.
107 / 130
125
Example #1: Bit Prediction
Of course, we should do majority vote over the past outcomes zt = I{ t1 1 y where yt1 =
1 t1 2}
t1 s=1 ys . This algorithm guarantees ct max{p, 1 p} and
lim inf (t max{t , 1 zt }) 0 c z
t
almost surely
()
Claim: there is an algorithm that ensures () for an arbitrary sequence. Any idea how to do it? Another way to formulate (): number of mistakes should be not much more than made by the best of the two experts, one predicting 1 all the time, the other constantly predicting 0. Note the dierence: estimating a hypothesized model vs competing against a reference set. We had seen this distinction in the previous lecture.
107 / 130
126
Example #2: Email Spam Detection
We are tasked with developing a spam detection program that needs to be adaptive to malicious attacks. x1 , . . . , xn are email messages, revealed one-by-one upon observing the message xt , the learner (spam detector) needs to decide whether it is spam or not spam ( t {0, 1}) y the actual label yt {0, 1} is revealed (e.g. by the user) Do it seem plausible that (x1 , y1 ), . . . , (xn , yn ) are i.i.d. from some distribution P? Probably not... In fact, the sequence might even be adversarially chosen. In fact, spammers adapt and try to improve their strategies.
108 / 130
127
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
109 / 130
128
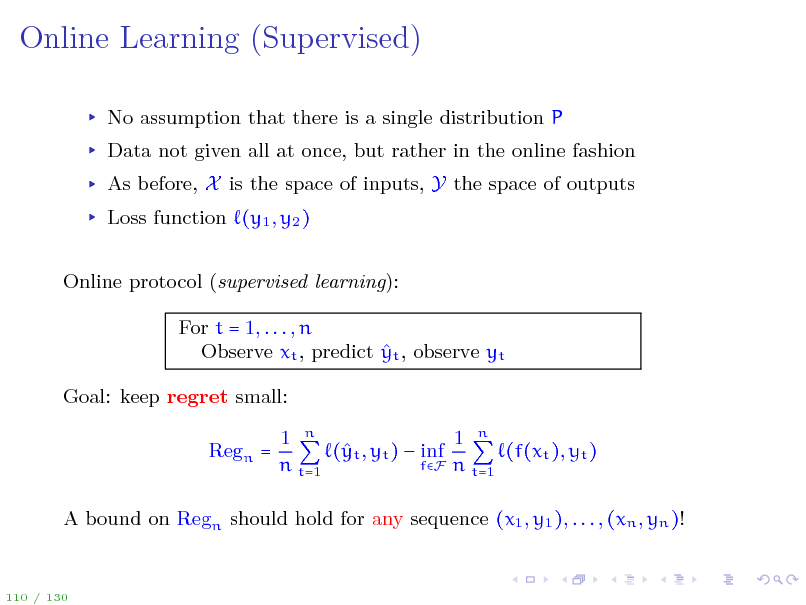
Online Learning (Supervised)
No assumption that there is a single distribution P Data not given all at once, but rather in the online fashion As before, X is the space of inputs, Y the space of outputs Loss function (y1 , y2 ) Online protocol (supervised learning): For t = 1, . . . , n Observe xt , predict yt , observe yt Goal: keep regret small: Regn = 1 n 1 n ( t , yt ) inf y (f(xt ), yt ) fF n t=1 n t=1
A bound on Regn should hold for any sequence (x1 , y1 ), . . . , (xn , yn )!
110 / 130
129
Pros/Cons of Online Learning
The good: An upper bound on regret implies good performance relative to the set F no matter how adversarial the sequence is. Online methods are typically computationally attractive as they process one data point at a time. Used when data sets are huge. Interesting research connections to Game Theory, Information Theory, Statistics, Computer Science. The bad: A regret bound implies good performance only if one of the elements of F has good performance (just as in Statistical Learning). However, for non-iid sequences a single f F might not be good at all! To alleviate this problem, the comparator set F can be made into a set of more complex strategies. There might be some (non-i.i.d.) structure of sequences that we are not exploiting (this is an interesting area of research!)
111 / 130
130
Setting Up the Minimax Value
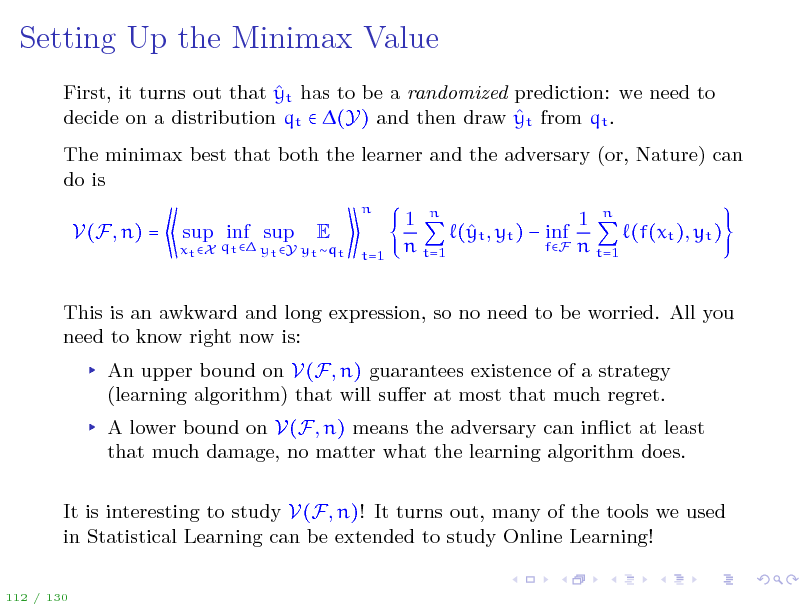
First, it turns out that yt has to be a randomized prediction: we need to decide on a distribution qt (Y) and then draw yt from qt . The minimax best that both the learner and the adversary (or, Nature) can do is
n
V(F, n) =
xt X qt yt Y yt qt
sup inf sup
E
t=1
1 n 1 n ( t , yt ) inf y (f(xt ), yt ) fF n t=1 n t=1
This is an awkward and long expression, so no need to be worried. All you need to know right now is: An upper bound on V(F, n) guarantees existence of a strategy (learning algorithm) that will suer at most that much regret. A lower bound on V(F, n) means the adversary can inict at least that much damage, no matter what the learning algorithm does. It is interesting to study V(F, n)! It turns out, many of the tools we used in Statistical Learning can be extended to study Online Learning!
112 / 130
131
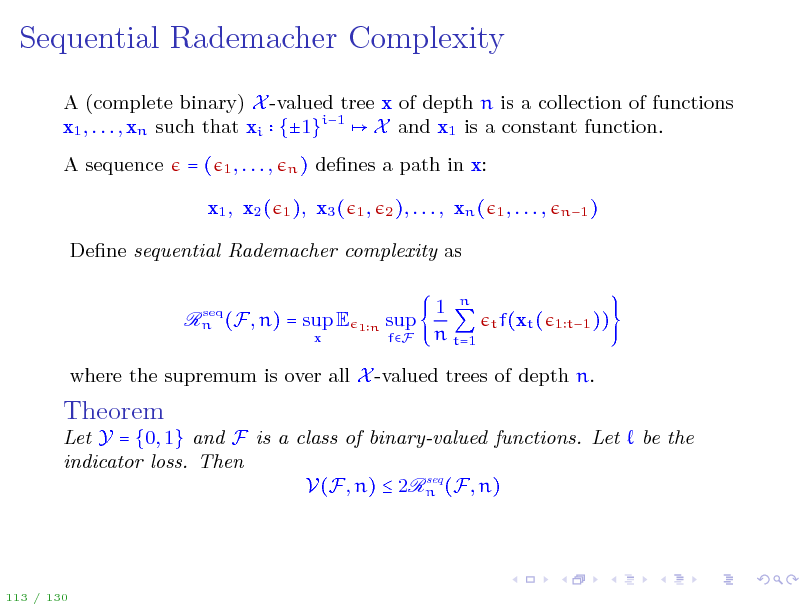
Sequential Rademacher Complexity
A (complete binary) X -valued tree x of depth n is a collection of functions x1 , . . . , xn such that xi {1}i1 X and x1 is a constant function. A sequence =(
1, . . . , n) 1 ),
denes a path in x: x3 (
1, 2 ), . . . ,
x1 , x2 (
xn (
1, . . . ,
n1 )
Dene sequential Rademacher complexity as
seq Rn (F, n) = sup E
x
1n
sup
fF
1 n n t=1
t f(xt ( 1 t1 ))
where the supremum is over all X -valued trees of depth n.
Theorem
Let Y = {0, 1} and F is a class of binary-valued functions. Let indicator loss. Then seq V(F, n) 2Rn (F, n)
be the
113 / 130
132
Finite Class
Suppose F is nite, N = card(F). Then for any tree x, E
1n
sup
fF
1 n n t=1
t f(xt ( 1 t1 ))
2 log N n
because, again, this is a maximum of N (sub)Gaussian Random variables! Hence, V(F, n) 2 2 log N n
This bound is basically the same as that for Statistical Learning with a nite number of functions! Therefore, there must exist an algorithm for predicting yt given xt such that regret scales as O
log N n
. What is it?
114 / 130
133
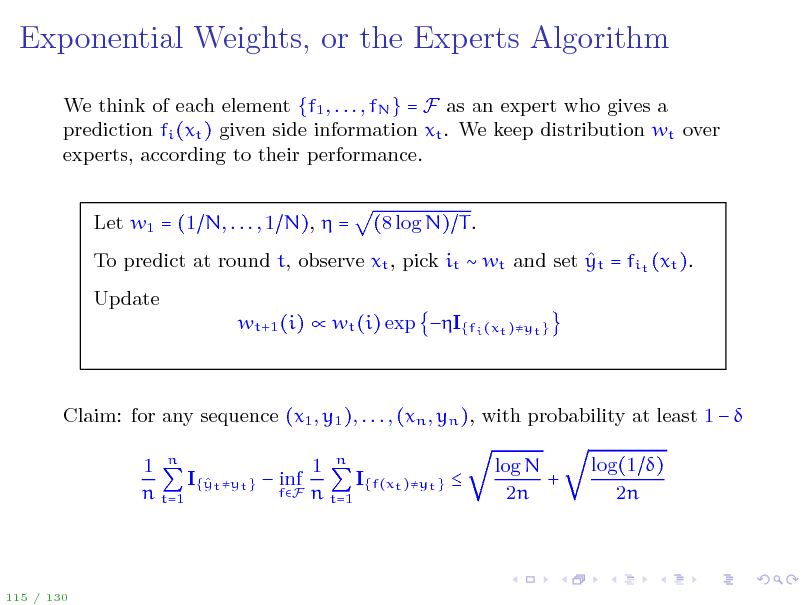
Exponential Weights, or the Experts Algorithm
We think of each element {f1 , . . . , fN } = F as an expert who gives a prediction fi (xt ) given side information xt . We keep distribution wt over experts, according to their performance. Let w1 = (1 N, . . . , 1 N), = (8 log N) T .
To predict at round t, observe xt , pick it wt and set yt = fit (xt ). Update wt+1 (i) wt (i) exp I{fi (xt )yt }
Claim: for any sequence (x1 , y1 ), . . . , (xn , yn ), with probability at least 1 1 n 1 n I{ t yt } inf I{f(xt )yt } y fF n t=1 n t=1 log N + 2n log(1 ) 2n
115 / 130
134
Useful Properties of Sequential Rademacher Complexity
Sequential Rademacher complexity enjoys the same nice properties as its iid cousin, except for the Lipschitz contraction (4). At the moment we can only prove seq seq Rn ( F) LRn (F) O(log3 2 n) It is an open question whether this logarithmic factor can be removed...
116 / 130
135
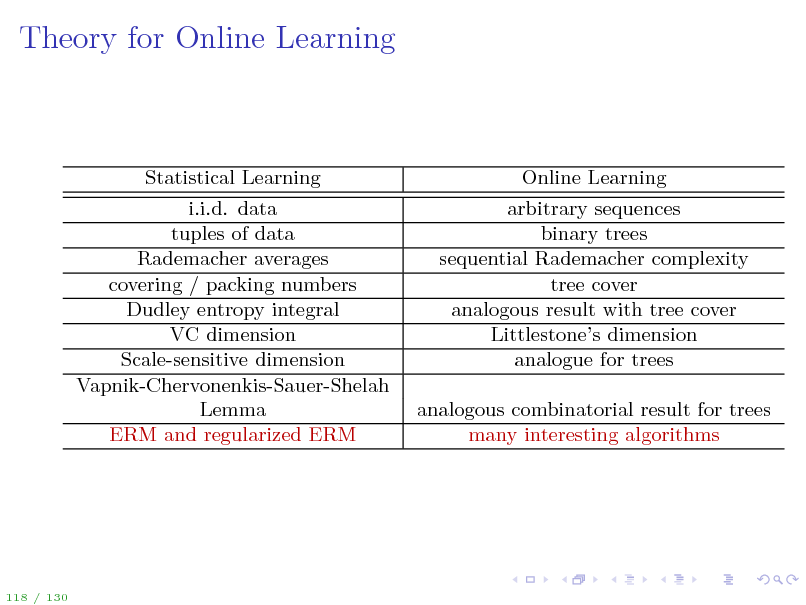
Theory for Online Learning
There is now a theory with combinatorial parameters, covering numbers, and even a recipe for developing online algorithms! Many of the relevant concepts (e.g. sequential Rademacher complexity) are generalizations of the i.i.d. analogues to the case of dependent data. Coupled with the online-to-batch conversion we introduce in a few slides, there is now an interesting possibility of developing new computationally attractive algorithms for statistical learning. One such example will be presented.
117 / 130
136
Theory for Online Learning
Statistical Learning i.i.d. data tuples of data Rademacher averages covering / packing numbers Dudley entropy integral VC dimension Scale-sensitive dimension Vapnik-Chervonenkis-Sauer-Shelah Lemma ERM and regularized ERM
Online Learning arbitrary sequences binary trees sequential Rademacher complexity tree cover analogous result with tree cover Littlestones dimension analogue for trees analogous combinatorial result for trees many interesting algorithms
118 / 130
137
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
119 / 130
138
Online Convex and Linear Optimization
For many problems, (f, (x, y)) is convex in f and F is a convex set. Let us simply write (f, z), where the move z need not be of the form (x, y). e.g. square loss (f, (x, y)) = ( f, x y)2 for linear regression. e.g. hinge loss (f, (x, y)) = max{0, 1 y f, x }, a surrogate loss for classication. We may then use optimization algorithms for updating our hypothesis after seeing each additional data point.
120 / 130
139
Online Convex and Linear Optimization
Online protocol (Online Convex Optimization): For t = 1, . . . , n Predict ft F, observe zt Goal: keep regret small: Regn = 1 n 1 n (ft , zt ) inf (f, zt ) fF n t=1 n t=1
Online Linear Optimization is a particular case when (f, z) = f, z .
121 / 130
140
Gradient Descent
At time t = 1, . . . , n, predict ft F, observe zt , update
ft+1 = ft (ft , zt ) and project ft+1 to the set F, yielding ft+1 .
is a learning rate (step size) gradient is with respect to the rst coordinate This simple algorithm guarantees that for any f F 1 n 1 n 1 n 1 n (ft , zt ) (f, zt ) ft , (ft , zt ) f, (ft , zt ) n t=1 n t=1 n t=1 n t=1 O(n1 2 ) as long as (ft , zt ) c for some constant c, for all t, and F has a bounded diameter.
122 / 130
141
Gradient Descent for Strongly Convex Functions
Assume that for any z, (, z) is strongly convex in the rst argument. That is, (f, z) 1 f 2 is a convex function. 2 The same gradient descent algorithm with a dierent step size guarantees that for any f F log(n) 1 n 1 n (ft , zt ) (f, zt ) O , n t=1 n t=1 n a faster rate.
123 / 130
142
Outline
Introduction Statistical Learning Theory The Setting of SLT Consistency, No Free Lunch Theorems, Bias-Variance Tradeo Tools from Probability, Empirical Processes From Finite to Innite Classes Uniform Convergence, Symmetrization, and Rademacher Complexity Large Margin Theory for Classication Properties of Rademacher Complexity Covering Numbers and Scale-Sensitive Dimensions Faster Rates Model Selection Sequential Prediction / Online Learning Motivation Supervised Learning Online Convex and Linear Optimization Online-to-Batch Conversion, SVM optimization
124 / 130
143
How to use regret bounds for i.i.d. data
Suppose we have a regret bound 1 n 1 n (ft , zt ) inf (f, zt ) Rn fF n t=1 n t=1 that holds for all sequences z1 , . . . , zn , for some Rn 0. Assume z1 , . . . , zn are i.i.d. with distribution P. Run the regret 1 t=1 minimization algorithm on these data and let f = n n ft . Then Ez,z1 ,...,zn (f, z) E 1 n 1 n (ft , z) = E (ft , zt ) n t=1 n t=1
where the last step holds because ft only depends on z1 , . . . , zt1 . Also, E inf Combining, EL(f) inf L(f) Rn
fF
fF
1 n 1 n (f, zt ) inf E (f, zt ) = Ez (fF , z) fF n t=1 n t=1
125 / 130
144
How to use regret bounds for i.i.d. data
This gives an alternative way of proving bounds on EL(fn ) inf L(f)
fF
by using fn = f, the average of the trajectory of an online learning algorithm. Next, we present an interesting application of this idea.
126 / 130
145
Pegasos
Support Vector Machine is a fancy name for the algorithm 1 m max{0, 1 yi f, xi } + f fn = arg min d m 2 fR i=1 in the linear case. The objective can be kernelized for representing linear separators in higher-dimensional feature space. The hinge loss is convex in f. Write 2 f 2 for z = (x, y). Then the objective of SVM can be written as (f, z) = max{0, 1 y f, x } + min E (f, z)
f 2
The expectation is with respect to the empirical distribution
1 m
i=1 (xi ,yi ) .
m
Then an i.i.d. sample z1 , . . . , zn from the empirical distribution is simply a draw with replacement from the dataset {(x1 , y1 ), . . . , (xm , ym )}.
127 / 130
146
Pegasos
A gradient descent ft+1 = ft (ft , zt ) with (ft , zt ) = yt xt I{yt then gives a guarantee E (f, z) inf E (f, z) Rn
fF ft ,xt <1}
+ ft
Since (f, z) is -strongly convex, the rate Rn = O(log(n) n). Pegasos (Shalev-Shwartz et al, 2010) For t = 1, . . . , n Choose a random example (xit , yit ) from the dataset. Set = 1 (t) If yit ft , xit < 1, update ft+1 = (1 t )ft + t xit yit else, update ft+1 = (1 t )ft
The algorithm and analysis are due to (S. Shalev-Shwartz, Singer, Srebro, Cotter, 2010)
128 / 130
147
Pegasos
1 t=1 We conclude that f = n n ft computed using the gradient descent 1 )-approximate minimizer of the SVM objective after algorithm is an O(n n steps. This gives an O(d ( )) time to converge to an -minimizer. Very fast SVM solver, attractive for large datasets!
129 / 130
148
Summary
Key points for both statistical and online learning: obtained performance guarantees with minimal assumptions prior knowledge is captured by the comparator term understanding the inherent complexity of the comparator set key techniques: empirical processes for iid and non-iid data interesting relationships between statistical and online learning computation and statistics a basis of machine learning
130 / 130
149